撰文 | 郑文
编辑|周长贤
「十年以后,连L3(自动驾驶)都不会真正实现。」
2023年4月1日,地平线创始人余凯的一句「反共识」的预言,浇醒了业界许多梦中人,也给已经看清局势的人再次提了个醒。也许是安慰,也许是奉劝,他建议业内人士不要太焦虑,「因为行业发展没那么快」。
地平线总裁陈黎明也表示:「自动驾驶还有漫长的路要走,它可能是目前汽车行业遇到的最复杂的系统工程,不光是软件、硬件,也不是某个方面的问题,是整个系统里的解决方案,要达到一定的成熟度。」
悲观者正确,乐观者前行,行业既少不了以余凯为代表的业界大佬的冷静提醒,也缺不了专注于此领域的自动驾驶创业公司脚踏实地的全情投入,高歌猛进。
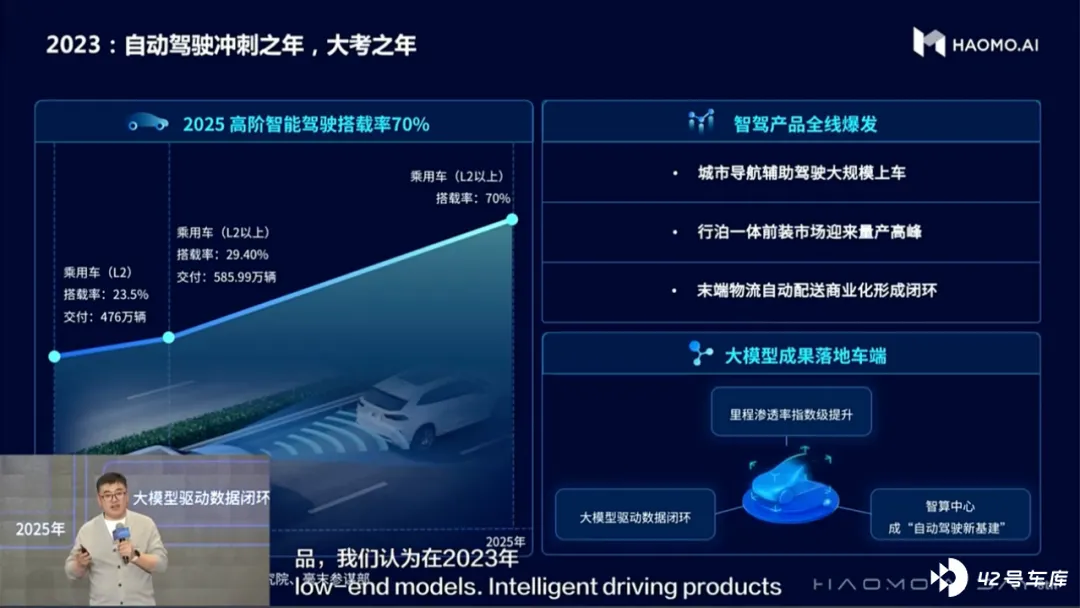
4月11日,毫末智行董事长张凯在第八届HAOMO AI DAY上指出,智驾产品正在进入快速增长的全线爆发期。他认为,2023年是非常关键的一年,「将是智能驾驶冲刺之年、大考之年。」
据工信部、高工智能汽车研究部、毫末参谋部的综合数据,2021年乘用车L2搭载率23.5%,交付476万辆;2022年乘用车L2以上搭载率29.4%,交付585.99万辆。据预测,2025年高阶智能驾驶(L2以上)搭载率70%。
眼前一个不容忽视的现实是,今年以来新车市场的价格战加剧,从国际巨头到国内车企,降价导致的成本压力都非常之大,「寒气」也很快传导到上游的供应链。
为了应对「寒气」,最近多家智驾方案解决商、芯片企业,都提出了更具性价比的产品解决方案。
「为什么今年主打的一个方向是性价比,目标其实很简单,对车企来讲,达到我要的功能,并且性价比高。这就是今年车企所有的主流观点。」黑芝麻智能创始人兼CEO单记章直言。
很大程度而言,这并非坏事。因为,性价比也是智能汽车规模化、可持续发展的重要推动力。
随着人们对市场的理解和预期越来越理性,很多车企把L2作为标配,并努力向L2+、L2++迈进,同时尽量从成本角度考虑优化系统,追求整体架构的合理性。
由此,汽车行业从一味追求高指标或者高性能自动驾驶功能模块的狂欢,转向兼顾性能与性价比,合理的算力加上高性能、高性价比之路。
在这个大背景下,随着自动驾驶商业化进入深水区,一些备受争议的议题正在达成共识,原本模糊的边界也需要新的界定。
跨越式路线不香了?渐进式成新宠
过去,在自动驾驶领域,渐进式发展与跨越式发展两种路径一直并存。
做L4等级自动驾驶的企业看不上渐进式发展的企业,在他们看来自动驾驶技术并不是拾级而上的,L2和L4的技术架构完全不同。比如,美国加州交通管理局发布的自动驾驶测试报告,从来不会带上特斯拉。
时任Waymo CEO的John Krafik公然表示:「特斯拉还算不上Waymo的竞争对手,因为特斯拉做的是辅助驾驶系统,而非无人驾驶系统。」
不过,城头已经悄然变幻大王旗,L4音量正在变小。最近,已经很少听到关于Robotaxi商业化进程的消息。
「现阶段做Robotaxi的企业都得完蛋,Robotaxi是结果而不是商业目标,中国市场打车体验已经很好,自动驾驶并不会让这个体验更好。」前华为智能汽车智能驾驶产品总监苏菁的话,一语成谶。
一场L4自动驾驶企业降维向L2的迁徙之旅正在轮番上演。
倒戈是大范围的。
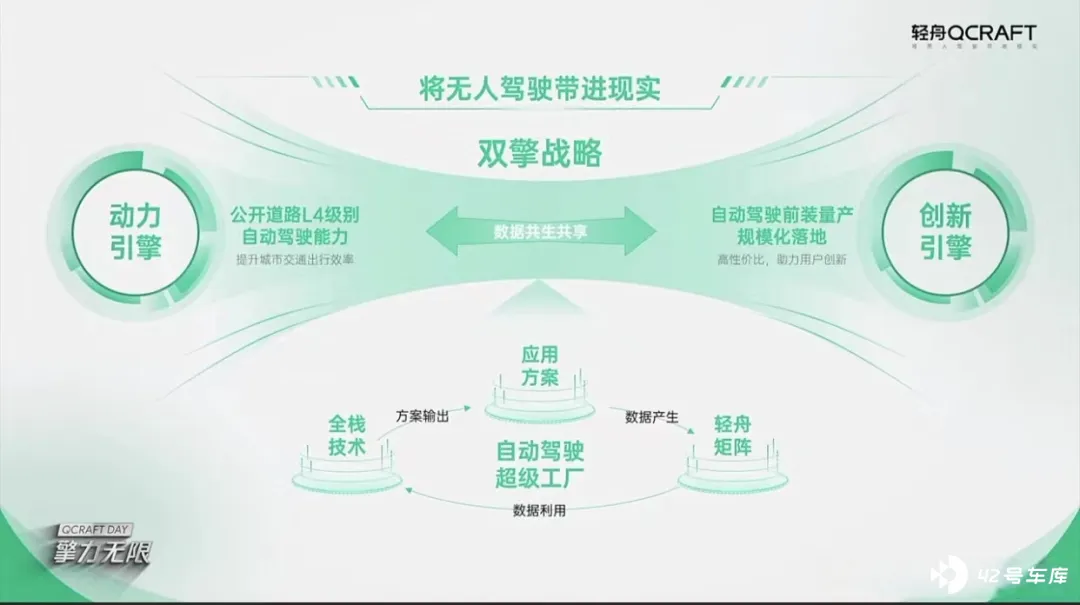
轻舟智航创始人、CEO于骞虽然很早就说过,他们的使命一直是将无人驾驶带进现实。但在商业化发展的道路上,原来做Robobus的他们也伺机提出了「择高处立,向宽处行」这种以战养战的经营方式。其很重要的商业化节点是与地平线合作,打造高性价比的行泊一体前装量产方案。
它的方式,与百度Apollo「攀登珠峰,沿途下蛋」的发展路径,颇有异曲同工之妙。就在2023上海车展前夕,百度向外界重申了一遍自己的智驾产品矩阵,除了旗舰版的城市、高速、泊车三域融通领航辅助驾驶,也有高性价比智驾方案和泊车、舱驾方案。
以Robotaxi起家的文远知行在获得博世集团的战略投资后,也联合了博世开展应用于乘用车L2~L3级自动驾驶软件的开发。这标志着文远知行从此撕下了「跨越式」玩家的标签。
有的自动驾驶公司甚至从一开始就选择既要、又要,Momenta是此类典型。这家公司一直采用量产自动驾驶(Mpilot)与完全无人驾驶(MSD)相结合的「两条腿」产品战略,提供不同级别的自动驾驶解决方案,更高效、快速地实现无人驾驶规模化落地。
2023上海车展期间,Momenta发布了Mpilot Pro中配量产智能驾驶解决方案。这次发布的解决方案,服务于15万元~35万元主流中端车型,可以在免搭载激光雷达和不依赖高精地图的方案上,提供性能领先的高阶辅助驾驶功能。搭载这个方案的车型,将会在下半年陆续推出市场。
由于两条腿走路,Momenta从一开始的默默无闻,逐渐走到了聚光灯下,不仅拿到不少车企订单,还拿到上汽集团、通用汽车、梅赛德斯-奔驰、丰田的战略投资。

或许是一早就精准预判到了L4的商业化困境,又或许是脱胎于主机厂的思维惯性,毫末智行团队则是始终坚持渐进式发展方式之路。
在张凯看来,数据是驱动自动驾驶成熟的核心要义,渐进式路线是数据积累的最佳路径。
「如何获取高质量的数据?这对自动驾驶技术的发展是非常关键的一步。所以最好的方式,我们认为通过一个系统,能够让真正的驾驶员开这个车,真正用这个系统,从而获取他在驾驶过程中的一些数据,做到数据驱动,逐步完善我们整个智能驾驶的能力和用户体验。」
很明显,这场自上而下的倒戈,所盯上的目标市场是面向主机厂提供L2+的量产解决方案。先不追求替代,而是提供帮助。
他们发现,主机厂是赛道的重要角色,背靠着的巨大乘用车市场需求有待挖掘。先做L2+量产方案,在尽快实现技术变现的同时,还顺便完成了全民对自动驾驶技术认知的普及。
时至今日,类似John Krafik的挑衅声音已经很难听到,鄙视链彻底被打断。
这意味着,主机厂为主导的渐进式路径以压倒性优势获得胜利。在企业「用脚投票」的选择之下,关于渐进式、跨越式的争论,正悄无声息地落下帷幕。
回归性价比,「行泊一体」大行其道
L2+的量产方案,先框定场景,再提供不同功能体验的方案。其中,以行泊一体功能的智驾产品为载体成为市场主流。
所谓行泊一体,是指将行车和泊车功能两套独立的系统,整合在单个域控制器中,将传感器深度复用、计算资源共享,以实现系列辅助驾驶功能。
业界普遍认为,行泊一体是汽车产品迈向高等级自动驾驶的必经阶段,从当下的L2级开始向L3级发展,高速和低速状态融合到一个系统内成为可能。
换句话说,在日后推出的更高级别自动驾驶系统中,行泊一体就是必备的「基础技能」。
黑芝麻智能产品副总裁丁丁从市场的角度阐述了行泊一体趋势的合理性,「高速NOA对老百姓使用自动驾驶来说最有效果或者说最有用,是可使之落地的,也是目前看到很清晰的自动驾驶短期目标。」
这一套东西的合并,可以覆盖更多驾驶场景,共享智能硬件,进行多传感器融合,从而简化接口,减少线束,仅需要开发一套底层基础软件和中间件,大幅提高域控制器开发效率和节省开发成本。
高工智能汽车研究院监测数据显示,2022年,前装标配行泊一体域控制器的国产乘用车上险量是77.98万辆,同比猛增99.63%,搭载率是3.91%,正值市场爆发前夕。
「我们认为接下来三年之内,行泊一体会非常迅速地扩展市场占有率。」安波幅ADAS工程总监张磊在4月17日的产品发布会上称。
他认为,「行泊一体不是终点,是微架构中间很小一个步骤,整车再向前发展,行泊一体概念慢慢也会消失。」
此时,还需要另一个关键因素。这场跨越式向渐进式的集体倒戈,带来了一个重要的投诚礼——「高性价比方案」。谁都明白,只有做出性价比最优的系统,才能让用户买单,车主的使用频率、满意度,都将成为产品竞争力的重要衡量标准。
除了前文提到的百度、Momenta、轻舟智航等方案,以2023上海车展为切片,还有不少主打性价比的方案展出。

禾多科技提供的行泊一体域控制器方案中,就有基于地平线单J3和德州仪器TDA4打造的中低算力域控制器超高性价比方案,基于双J3和TDA4打造的中算力域控制器高性价比方案,两个方案最高可以支持L2++高速领航和记忆泊车功能。
基于单J5和TDA4打造的中高算力域控制器高性能方案,最高可以支持L2++高速/部分城区领航辅助及记忆泊车功能。
安波福推出的行泊一体ADAS解决方案,由中国本土团队领衔开发,可以实现领航辅助、自动泊车、记忆泊车和泊车紧急制动等功能。

这个解决方案在国内率先搭载安波福第七代4D毫米波雷达,在维度层面新增高度信息,采用了最新的空气波导裂隙天线技术,在提高性能的同时又极大地优化了成本。据透露,该方案搭载的车型将在2024年量产落地。
佑驾创新带来了基于地平线征程芯片和德州仪器芯片开发的智能驾驶域控制器全系列产品。其中,智能领航辅助iPilot域控系列产品,基于地平线征程系列芯片开发的iPilot 2、iPilot 3、iPilot 3 plus分别采用了征程3、征程5以及两颗征程5芯片方案,支持行泊一体。
基于德州仪器芯片打造的iPilot 1、iPilot 1 eco、iPilot 1 plus三款产品,涵盖不同算力芯片与配置,能够在资源有限的情况下,有效平衡性能与成本,同样支持行泊一体及高速NOA等功能的开发,满足不同价位、不同车型的量产装配需求。
如果把时间线再往前拉一点,4月7日,黑芝麻发布了C1200芯片,单颗芯片可以满足包括CMS(电子后视镜)系统、行泊一体、整车计算、信息娱乐系统、智能大灯、智能座舱、舱内感知系统等在内的跨域计算场景。这块芯片把侧重点也放在了性价比上。

黑芝麻智能目前能够实现支持10V(摄像头)NOA功能的行泊一体域控制器BOM成本控制在3000元人民币以内,支持50TOPS~100TOPS的物理算力。
从软件方案到硬件基础,拼成本都是首要的任务。如此一来,有不少人担心拼到一定程度会不会失去迭代能力?
值得关注的是,张凯在毫末AI DAY上给出过回答,不管是L4的公司还是渐进式的公司,数据驱动是一定要坚持的方向,成本降得再低,数据驱动的底线一定要坚持住,才能做到可持续、可生长。
按照毫末智行的定义,智能驾驶的发展历程,逐渐从原来硬件驱动时代,发展到软件驱动时代,再到现在的数据驱动时代。
这点对主机厂也成立,黑芝麻智能产品副总裁丁丁认为,「数据是下一代智能汽车的血液,只有在新的电子电气架构下,保证非常大数据量高速流转,才能进一步支撑后面在新的电子电气架构上所部署的功能。」
举「重感知轻地图」之旗,打响城市NOA百城大战
在L2+的前装量产方案中,城市智能驾驶场景成为各家必争之地,城市NOA产品开始量产发力,主要玩家的城市导航辅助驾驶产品进入到真实用户覆盖和多城市落地的比拼。
在造车新势力阵营,以智能化为标签的小鹏宣布XNGP系统将在2023年上半年之前,除G9 Max版本车型交付即有高速NGP、记忆泊车、LCC、智能泊车等功能外,在全国范围(所有无图城市)开放识别红绿灯并直行通过路口能力,城市NGP覆盖广州、深圳、上海三座城市。
2023年下半年,在大部分无图城市开放变道、超车、左右转能力(部分高等级能力可用范围将根据用户数量和测试进度分阶段开放),2024年完成全场景打通,实现从车位到车位的智能导航辅助驾驶能力。
小鹏的发布并不是孤例。4月11日,毫末智行也宣布了可大规模量产落地、重感知城市NOH,将首批落地北京、保定、上海等城市,并开启泛化测试,到2024年有序落地100城。首款搭载HPilot3.0的新摩卡DHT-PHEV将于近期上市,第二款搭载毫末Hpilot3.0的车型魏牌蓝山也将在今年发布。
「城市智能驾驶」是场景有多重要呢?数据显示,用户的总用车里程中,城市道路占比高达71%,换成用车时长维度则可以占到90%。同时,每天仅有25%的用户出行会通过高速,而城市道路则是100%。

城市NGP难度量级在高速场景百倍以上,由于整个交通的复杂性高,参与者的数量多,城市道路多样化,且不同城市之间路况也有差异化,凡此种种,给城市场景的自动驾驶实现带来了巨大的挑战。
在落地城市智驾场景的实际应用中,高精度地图并不能够完全覆盖,不仅资质审核、复审困难,测绘采集工作量大、道路信息更新频繁、敏感道路数据政策限制多,步步掣肘。
目前,业界探索出的新方案是改用BEV感知技术架构,以更少地依赖高精地图。
传统的以CNN为核心的感知架构,车辆感知到的是一帧帧空间信息,这些信息是需要依赖高精地图来串联,以保持连续性。
BEV感知架构,是基于多视角摄像头的3D目标检测在鸟瞰图下的感知(Bird’s-eye-view Perception,BEV Perception)。这是一项由神经网络将图像信息从图像空间转换到BEV空间的技术,增加了时序的维度,自建时空,可以「看」到连续的世界,这也是实现无图智驾的基础。
以小鹏的BEV感知架构XNet深度视觉神经网络为例,「XNet使我们真正能够突破高精地图的限制,至少是减少依赖。」小鹏汽车自动驾驶中心副总裁吴新宙表示,「这是下半年我们能在数十个无图城市释放XNGP的原因。」
基于BEV,越来越多的企业开始高举「重感知轻地图」的大旗。
据毫末智行CEO顾维灏介绍,得益于BEV的加持,毫末MANA架构的能力正在持续提升:
*可以同时学习三维空间结构和图片纹理,并将纯视觉测距精度超过了超声波雷达,BEV方案也拥有了更强的通用性和适配性;
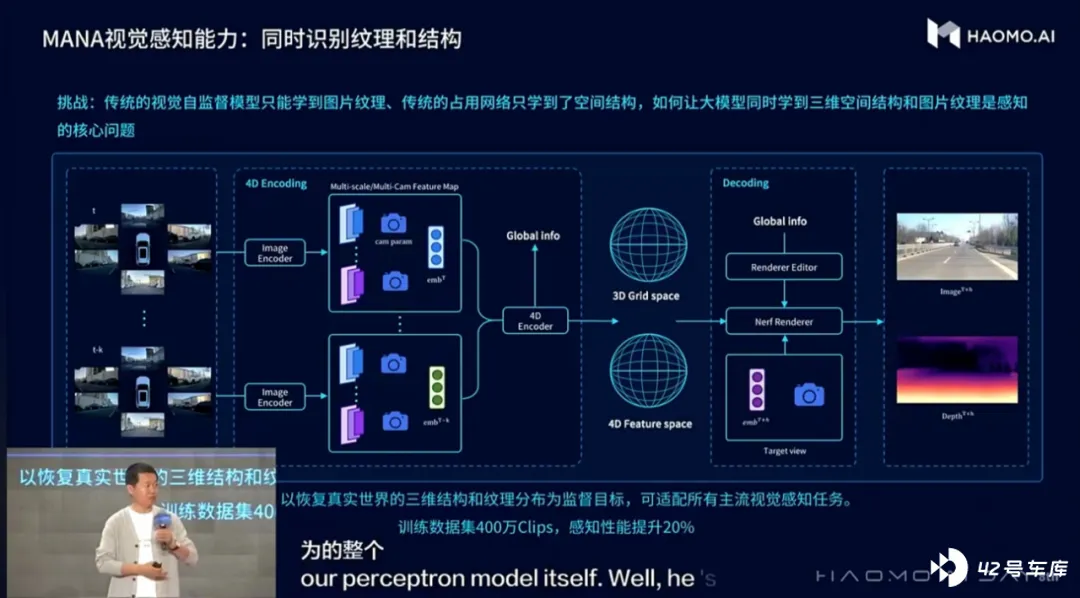
*还可以实现单趟和多趟纯视觉NeRF三维重建,道路场景更逼真,肉眼几乎看不出差异。通过NeRF进行场景重建后,可以编辑合成真实环境难以收集到的Corner Case,用更低成本测试后提升城市NOH能力边界,更好提升应对城市复杂交通环境。

面对目前行业里最难的视觉任务之一——单目视觉测量,继特斯拉后,毫末智行在中国率先开始验证能否使用鱼眼相机代替超声波雷达进行测距,以满足泊车要求。泊车场景使用纯视觉测距来取代超声波雷达,会进一步降低整体智驾成本。
是不是有了这些技术进步,城市NOA就可以快速攻城掠地了呢?事情可能没有想象得那么乐观。
吴新宙认为,「城市里面做辅助驾驶不是意愿问题,是能力问题,我们相信需要一段时间去逐步完善。但是在辅助驾驶的角度,我们认为它会很快地接近80分,甚至85分的状态。」
毫无疑问,随着城市的增加,工程量就会增加。
以红绿灯为例,石家庄有爱心形状的红绿灯,天津有进度条一样的红绿灯......吴新宙还分享了一个案例,在上海试开第一版时,满街的红灯笼,给红绿灯检测带来相当的困难。上述情况,对于能力的泛化会提出更高的要求,对于工程化来说,也是一个需要解决的问题。
由于汽车驾驶的上路容错率低,余凯认为,城区NOA在技术上还有挑战,现在基本上是20~30公里要接管一次,起码要研发至少三年才会得到较好的进步。
他直言,「现在到2025年真正要做的是,在合理性价比上把高速NOA、环线NOA这种封闭道路的自动驾驶做到如丝般顺滑,但是价格不能太贵。」
而对于甚嚣尘上的「抛弃高精地图」的言论,四维图新CEO程鹏对《出行百人会/AutocarMax》表示,过去的方案往往是过于依赖高精地图,不过地图永远甩不掉,因为它是现实世界的物理抽象,是自动驾驶的先验传感器。
他认为,「真正要做高阶自动驾驶,总体上地图是性价比最高的方法。自动驾驶是一个系统,系统里面有N个要素,地图是其中之一,你要说重哪个轻哪个其实都是可行的,最终是要有一个性价比最优的系统。」
对于新的趋势,四维图新的应对方案是OneMap,将导航地图、高精地图、ADAS地图和停车场地图合而为一,通过完全统一的底层拓扑使OneMap兼具导航抽象和现实世界表达能力,以「一张图」赋能智能驾驶时代,实现人驾、车驾无缝衔接,智舱智驾深入融合。
激光雷达,nice to have还是must have?
随着L2+的方案开始大流行,对于激光雷达企业来说,有个更迫切需要回答的问题。激光雷达,到底是功能件,还是安全件?是必须有,还是有它更好?
把激光雷达看作安全件,意味着它是安全升级的附加品,有它比没有更好,但如果把激光雷达作为功能件,就意味着它是必要硬件,没有它就没法实现功能。

作为感知硬件,激光雷达上车一直是极富争议的,原因在于,这个成本巨大的感知硬件,上车价值体现不明显。
那么,激光雷达到底是nice to have还是must have?对这个问题的辨析,关系着车企会不会抛弃激光雷达。
恰好,禾赛科技联合创始人、CEO李一帆在2023上海车展前的新品发布会上着重讲了这个话题。
去年12月27日,禾赛科技宣布公司自成立以来累计交付10万台激光雷达,其中2022年共交付近8万台,成为年度量产冠军。即便如此,李一帆还是正视了上述问题。
「最近一两年,更多的客户开始转变观念,把激光雷达作为一个功能件。」李一帆表示,长期看来,激光雷达作为功能件,将可以解锁更多的场景应用,对于L3、L4级别自动驾驶的功能,激光雷达会成为标配的硬件。
综合许多不同车企、供应商的看法,业界普遍认为对于实现L2+向L3级及以上的自动驾驶的跨越,高性能激光雷达是必选项。
同样是激光雷达排头兵,同样面对此质疑,图达通CEO鲍君威认为,关键是要有区分性的体验,有了区分性体验大家自然就会付钱。
「我觉得大家可能还没有感知到价值,是因为还没有实现,没有真正拿到确定性的体验。有区分的体验就是,能够靠得住这个感知系统。什么是靠得住呢?不能漏掉小物体,要能够很舒适地去做加速、变道、减速这种事情。」
目前,全球首个获得部分国家认证的L3自动驾驶系统奔驰Drive Pilot,感知套件中高性能激光雷达就是非常重要的一环。据悉,奔驰已获批在美国内华达州、加州和德国部署其「Drive Pilot」自动驾驶辅助系统。
不过,鲍君威认为,L3有一个bug:速度慢,时速只能限制到60公里以内,「因为传感器不够,硬件不够的话还是不行。」
对激光雷达的质疑,很重要的一部分原因来自于特斯拉。有人甚至调侃称,马斯克是激光雷达企业的一生之敌。正是因为特斯拉的方案,坚定地走视觉路线,众人也就产生了疑惑,激光雷达是不是可以不要?
对此,李一帆判断,马斯克选择纯视觉方案是出于商业判断,而不是技术判断。
悖论在于,生命无价,但企业是算成本的。在商业模型中,成本的确是敏感因素。因此,到底是技术判断,还是(成本规划)商业判断,不同主机厂有不同的选择。
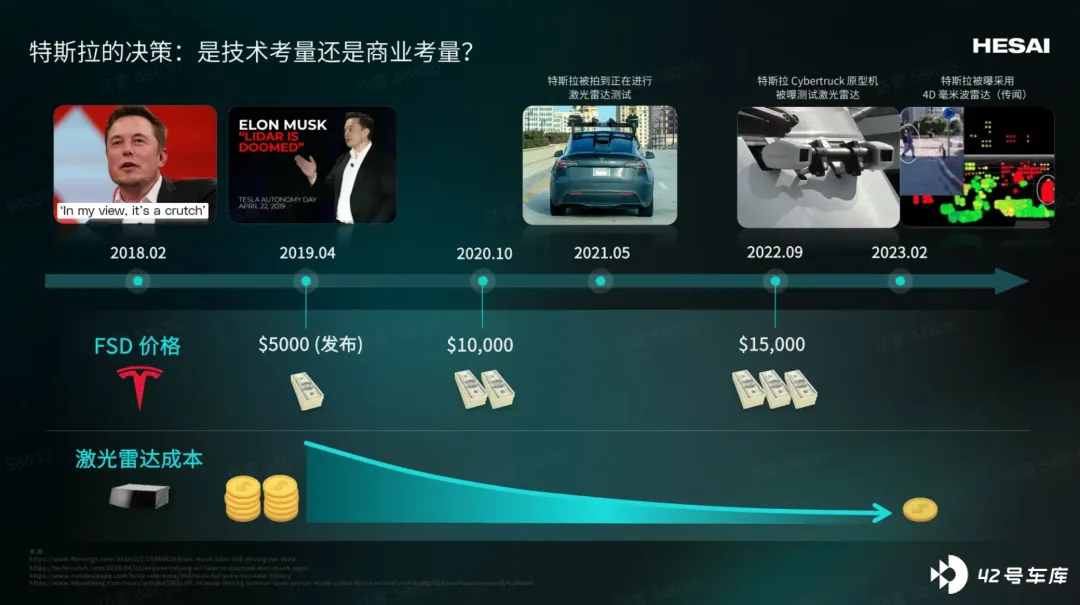
「上不上激光雷达是一个商业决策,价格合适、功能合适就上,不行就不上,不用纠结于一定用还是不用。」李一帆给出了自己的立场, 但 选不选激光雷达,这是交给车企自己做决定的事儿。
一个信号是,L2+级别城市NOA,可能摆脱不了对激光雷达的使用。
以理想汽车为例,智驾方案分为AD Pro和AD Max两个版本,AD Pro方案感知硬件上没有搭载激光雷达。短期来看,AD Pro在功能开发上,将止步于高速场景NOA能力。
按照李一帆的判断,未来是否搭载激光雷达,将成为城市NOA的分水岭。
轻舟智航联合创始人、CTO侯聪也曾表示,要想实现一个良好体验的L2+功能,对传感器的要求很高,与Robotaxi非常接近。

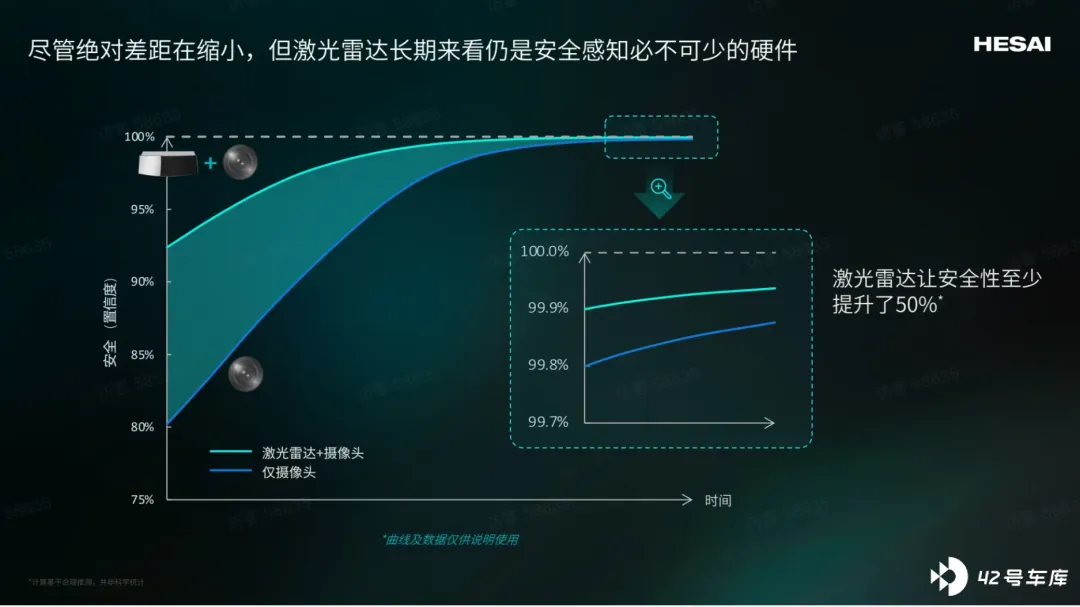
鲍君威则认为,即使是L2,也需要一个靠谱的感知系统。「非常低的误报率,几乎为零的漏报率,这样才能靠得住。经过各种分析,我们发现没有激光雷达是万万不行的。」
他判断,在将来的五年以内,甚至更远,纯视觉方案跟激光雷达所实现的功能,完全不是一类的东西。
在消费者感知层面,激光雷达企业正在不断去证明自己的不可或缺,但他们的自证需要时间去验证。
从这个角度而言,激光雷达企业的遭遇,可以用纳西姆·尼古拉斯·塔勒布在《黑天鹅》一书中的名句来形容,最大的确定性就是不确定性。
结语
如果要用一个词概括自动驾驶的蜿蜒发展路,「载沉载浮」似乎是行业到目前为止的主旋律。在行业里的人,像在起伏不定的海面上航行,一边不停奋力划桨,一边不断调整航向。
曾几何时,一谈到「自动驾驶」,人们首先想到的是最高形态的自动驾驶场景,汽车自己能完成所有驾驶行为,可以像机器人一样听懂人类的指令。
但随着Waymo等奔着最高形态去的自动驾驶公司面临巨大困难,冷静下来的行业倒向「约定场景落地」的那一边。现象背后的深层逻辑是,自动驾驶技术发展普及的改弦更张。
在落地量产时,什么愿景、理想,都要暂时抛诸脑后,商业化要求的是功能、交付与成本的平衡,在成本可接受的基础上,要求产品体验兼具方便好用,很现实。
难怪张凯感叹,「我们做了三年前装量产,真的是一个辛苦活儿,涉及到方方面面,跟做Demo完全不一样。」
即便如此,自动驾驶行业仍在用「泥腿子」式的方式,奔向诗与远方。
放眼未来,当我们在2030年回望时,今天的趋势变化,也许只是一次对航向的调整,也许是一场伏脉千里、影响深远的变革,答案要等时间给出。
可以确定的是,这是自动驾驶发展史中最具象的一幅画面,却足以载入史册。