_20230830003258.jpg?x-oss-process=image/format,webp)
作者| 苏清涛
今年以来,在一些车企的决策中,「去激光雷达」似乎已经开始从理论层面升级到实践层面。不过,在本质上,要不要用激光雷达,不单是个技术路线问题,更是个成本问题。一旦激光雷达的价格降到 200 美金以内,那些如今正讨论「去激光雷达」的主机厂,便可能会「另做考量」。
在电子行业,有一个普遍规律是:产品的芯片化程度越高、芯片的集成度越高,成本就越低。在 ToF 激光雷达中,产业界已默认芯片化的 VCSEL+SPAD 面阵是降本的大方向,并且,VCSEL 和 SPAD 的集成度越高,成本就越低。
探索如何通过芯片化来提高 VCSEL 和 SPAD 的集成度的,有两股力量:头部激光雷达厂商,激光雷达上游的供应商。
经过几年的发展,国内有很多家 VCSEL 芯片供应商已经进入成熟量产阶段,可以提供比较丰富的选择,而 SPAD 芯片这块技术主要掌握在索尼、滨松、安森美等国际供应商里 ,中国供应商鲜有涉及。
尤其是,供应商的产品中,用于车载激光雷达的大面阵 SPAD 芯片,只有索尼的 IMX459。
因为,大面阵与小面阵的关键区别在于应用场景、分辨率和探测距离。大面阵既要分辨率足够高,又要探测距离足够长,还要信噪比较低,这对数据采集和处理都提出了很高的要求。
大面阵在工程实现上的难度都要比小面阵大得多。好比你做个 8051 单机,别人做个大型服务器 CPU,两者都可以叫「中央处理器」,但在难度上来说,两者有质的区别。
SPAD 芯片从小面阵到大面阵,难度的升级,就好比盖楼:如果只打算盖 10 米高的楼,用木材就可以盖出来,农耕时代就是这么做的;但如果想盖一个 100 米或 200 米高的楼,它就一定需要钢筋混凝土、力学仿真、大型工程机械等等 ,它背后需要一系列现代化的工程能力。
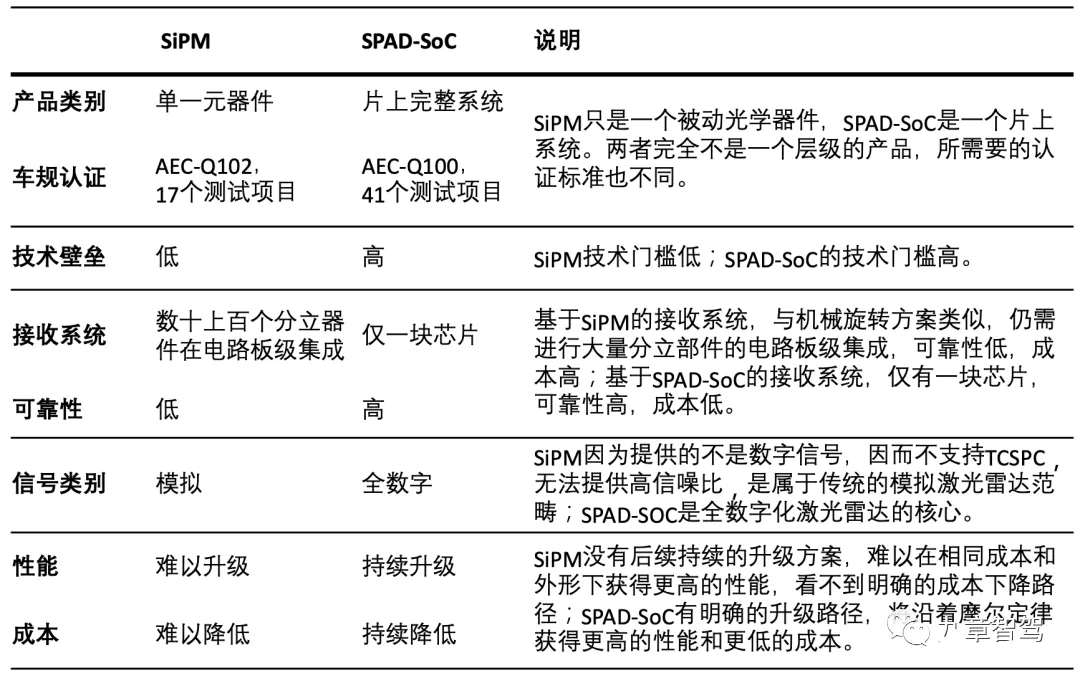
由于大面阵 SPAD 芯片的研发难度较高,因此, 现阶段,在探测端采用 SPAD 技术的激光雷达厂商只好「退一步」,先在量产产品上采用了过渡形态的 SiPM— —SPAD 输出的是数字信号,而由一组 SPAD 及电阻电容元件串并联而成的 SiPM 输出的则是模拟电路,这就没有将 SPAD 的优势充分发挥出来。
不过,在两年前,主攻高度集成化、全芯片化、全数字化 SPAD-SoC 的识光芯科公司在苏州成立。在此之前的几年,识光创始人曾领导设计了全球首款用于车载激光雷达的大面阵 SPAD 芯片。
⽬前,识光芯科(下文简称为「识光」)团队已经完成了三款芯片的回片点亮,包括⼀款毫米级精度的单点 SPAD-SoC、⼀款 BSI SPAD 测试芯⽚和 ⼀款⾯阵测试芯⽚。
此外,还有两款大面阵 SPAD-SoC 已完成设计并交付流片。其中一款是百万级像元的大面阵 SPAD-SoC SP100,另一款则是旗舰版 车载大面阵 SPAD-SoC SQ100——将于 2024 年初回片。
为解开这款 SPAD-SoC 的神秘面纱,笔者于近日跟 识光团队 做了深入交流。
识光大面阵 SPAD-SoC 的几大亮点
1. 感算存一体,高度芯片化集成
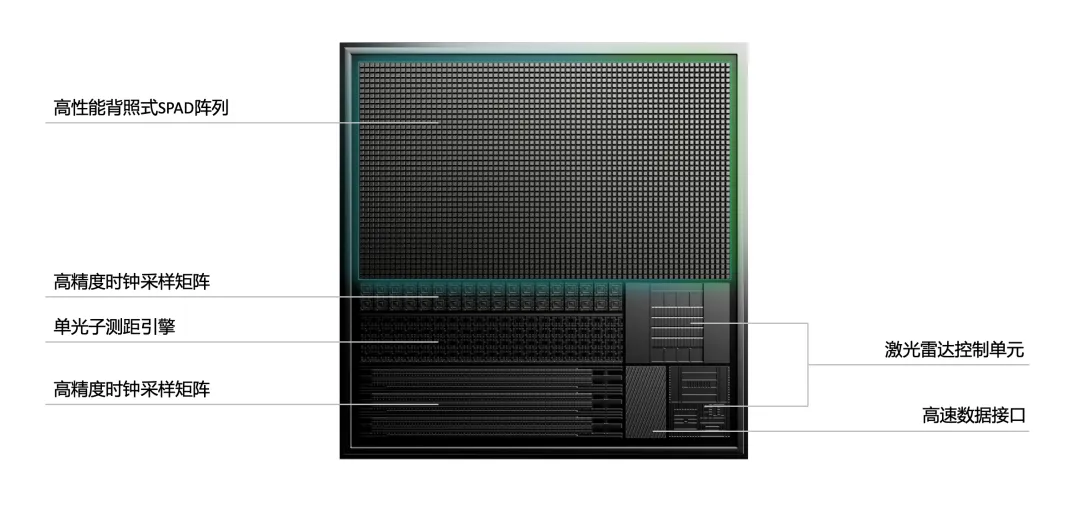
感存算一体,即 SPAD-SoC 方案中,感知(高性能背照式 SPAD 阵列、高精度时钟采样矩阵)、计算(高并发 dToF 感知算法加速器)、存储(单光子测距引擎)几个单元都被集成到一个空间里面了。
感算存一体的芯片化集成,使得各模块间的数据传输不受分立芯片间的带宽和延迟限制。
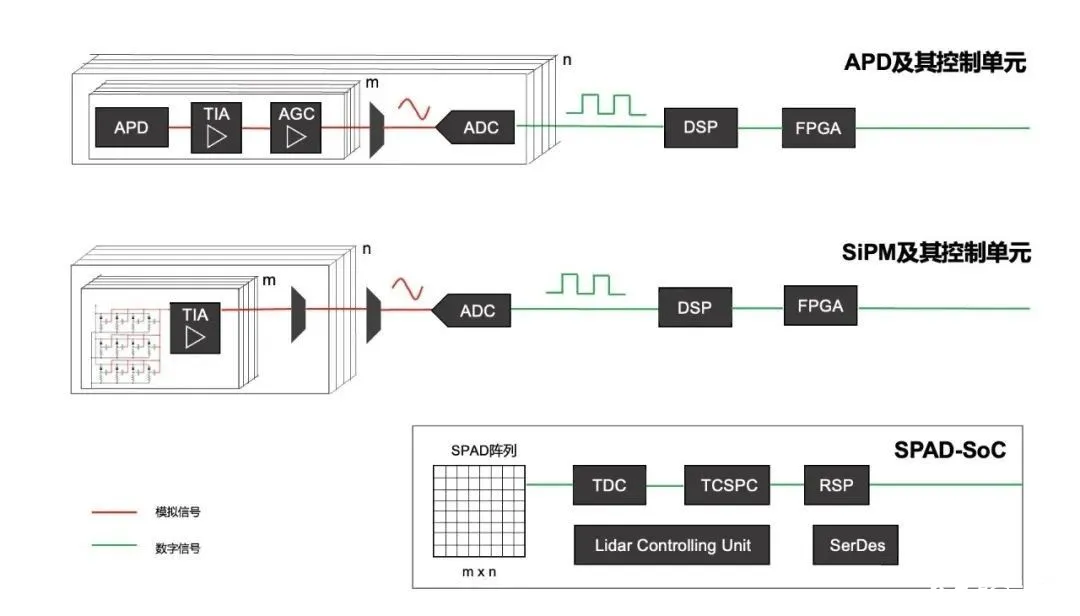
车载高性能激光雷达 SPAD-SoC 每秒产生的原始数据达到 TB 每秒的量级,不可能靠片外处理,于是,片上算法的好坏就显得尤为重要。而 上图中的单光子测距引擎( RSP , Ranging Signal Processor) , 就是识光将测距算法固化在硬件上了。把量最大、消耗运算资源最多的那部分数据处理,在 SoC 芯片内部实现,这让百万级像元的 SPAD 面阵具备了实现的可能性,同时有助于减小系统的整体功耗。
识光芯片上集成的测距算法解决了探测过程中同步、滤波、寻峰、降噪、补偿等问题,获得了毫米级的测距精度,实现了抗多机和环境光干扰。
识光:
单光子测距引擎如果做得足够好,就能把环境光噪声抑制下去,然后把原始信号剥离出来,这对提升探测器的探测效率是有帮助的。
第一张图右侧的激光雷达控制单元,取代的是当前激光雷达公司常用的作为主控芯片的 FPGA 或 MCU。当前,一些激光雷公司的计划是用一颗 ASIC 芯片来取代 FPGA 或 MCU,但识光的做法是将这个功能模块集成到 SPAD-SoC 中了。
值得一提的是,激光发射控制器,也被集成到激光雷达控制单元中了。这样不仅降低了 BOM 成本,也降低了光学装调和制造的难度,使得激光雷达的整机成本降至 200 美金甚至 100 美金有了可能。
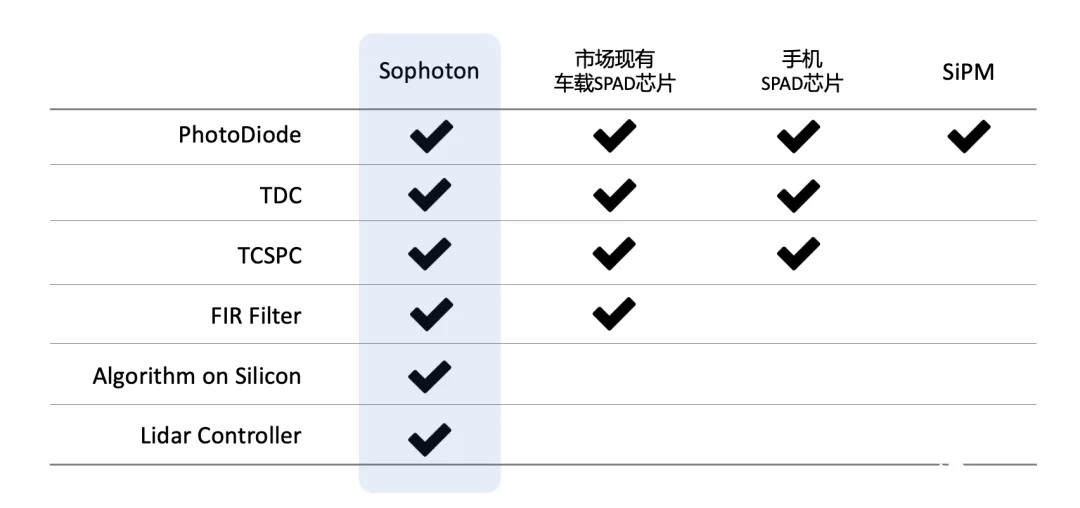
目前,为数不多的几款 SPAD 面阵产品,均未达到如此高的集成度。
2. 全数字化
SPAD(单光子雪崩二极管)是一个光电转换器件,在激光雷达应用中,用来检测激光回波信号。不同于传统的光电转换器件,SPAD 器件在理论上拥有无穷大的增益,可以灵敏地检测到单个光子的存在。
无论是此前的主流探测器 APD 还是当前的主流探测器 SiPM,输出的信号都是 模拟信号 ;而 SPAD 阵列输出的则是 数字信号 。
模拟信号的信息采集往往需要复杂的多颗独立芯片精密配合,成本高、体积大,同时,其对信号的分辨能力弱、解析力差,对能量的使用效率又很低,最终导致功耗高。
比如,APD 器件,由于增益有限,需要非常高的激光发射功率,而且它需要几十甚至上百伏特的偏置高压,因此,这个技术路线很难被小型化集成。
再比如,SiPM 器件,虽然也使用了 SPAD 做为感光像元,灵敏度有所提升,但由于为了「向下兼容」输出模拟信号,简易的电阻电容串并联引入了大量噪声和失真,对像元的使用效率也很低,所以,为了实现较高的性能,还需要把激光器发射功率做得很高、把光学系统的尺寸做得很大。
另外,模拟信号天生易受到各种干扰,再加上现代电子系统中普遍采用数字信号处理技术,模拟信号就必须经过模数转换(ADC)为数字信号后才能进行处理,整个过程会导致数据失真,其最后输出的数据精度无法与数字信号相比。
而在识光的高集成度 SPAD-SoC 方案中,从光子进到激光雷达里边被转化为电信号,再到后面的数据处理,再到点云的呈现,整个过程全部都是 数字化 的。
在这个数字化的架构中,SPAD 采集到的信息通过单光子计数的方式被精确地累加并记录起来,不会发生 SiPM 系统中的数模模数二次转换带来的损耗与失真。
数字化的像素靶面还可以更精准地匹配光斑,带来更小的暗计数噪声。再加上时域或者空间的巧合检测,使得系统信噪比大幅提高,所需的发射光功率和光学组件尺寸大幅下降,也可以轻松达到几十皮秒的精度的数字时间采样(SiPM 数据采样的时间分辨率往往只能做到纳秒级别)。
全数字化架构 是公认的下一代激光雷达架构。
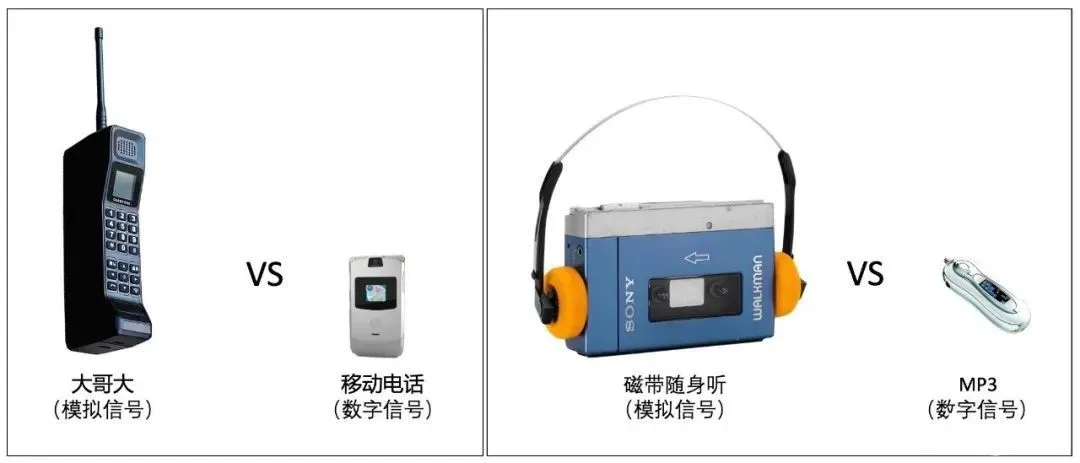
数字化的优势也早已在电子行业中得到普遍验证,例如大哥大到数字移动电话、磁带随身听到后来的 MP3, 一旦完成了模拟到数字的转换,电子产品就可以进行芯片化集成,性能更高、体积更小,整个行业的门槛也会随即降低,产品得到广泛应用。
过于「数字化」这个主题,在后面的对话部分,我们会做更详细的讨论。
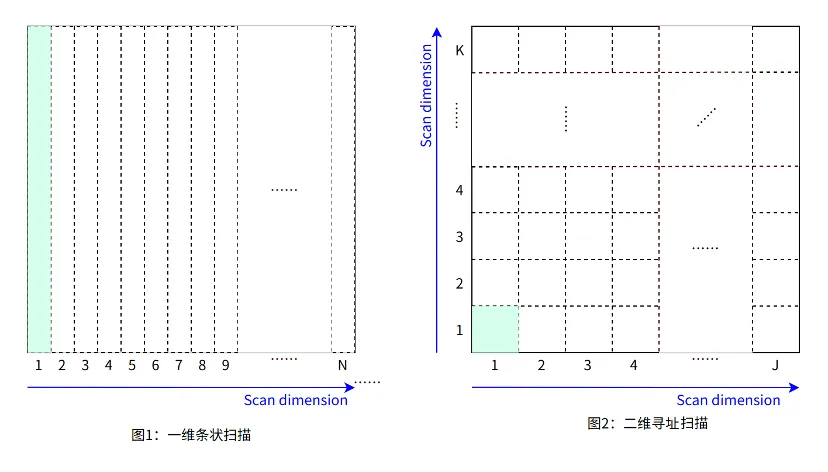
3. 支持 2D 寻址
以在一个维度还是两个维度扫描为依据,可将全固态激光雷达分为 1D 寻址与 2D 寻址。所谓 1D 寻址,即只在 X 轴这个方向上扫描;所谓 2D 寻址,即可在 X 轴和 Y 轴两个方向上扫描。
相⽐于 1D 寻址, 2D 寻址扫描分区可以更⼩,同⼀分区内不同像素通道间的串扰影响更低,行业里公认 2D 寻址是解决「 高反污染 」问题的「最佳方案」。
注:有多家激光雷达整机厂商反映,在使用 SPAD 技术时,如果扫描的近距离目标周围存在高反射率的物体(例如镜面、路标、金属等,简称「高反物体」),会引起串扰及膨胀的问题。对这些「高反物体」干扰激光雷达正常功能能力的问题,我们统称为「高反污染」。
此外,在分区数量相同时,VCSEL 激光器打线的 pad 更宽,更容易布线,而且同一分区激光器发光的一致性更好,对驱动的设计也更友好(有助于电流的导通与关断)。
但⽬前尚未⻅2D 寻址的 SPAD 芯片。
1D 寻址的 SPAD 方案理论上也可以通过将 1D 分区的窄长条切分为过于细碎的窄短条来实现「类 2D」寻址,但这种方式下系统的帧率和探测距离会急剧下降。这跟 2D 寻址「能够在解决串扰问题的同时保持高帧率和远探测距离」的优势不符。
(2D 寻址这个内容比较复杂,一两句说不清楚,在文章末尾的「附」部分,会有 3000 多字的内容专门谈这个话题。)
4.不止 成像
识光方面称:
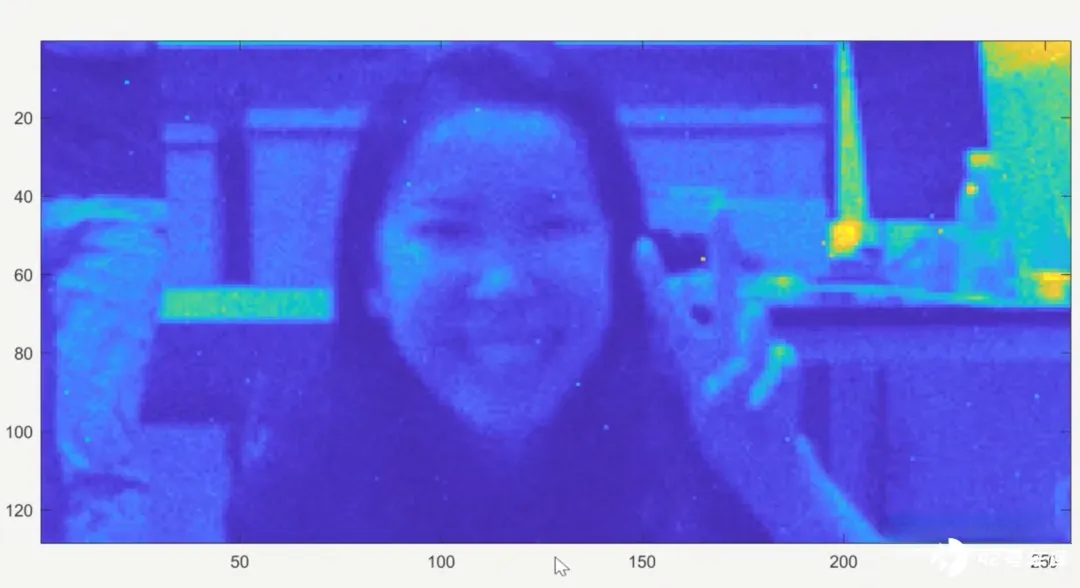
基于 SPAD 的无穷大增益和单光子检测能力,这款 SPAD-SoC 具备高速和暗光成像等特点,因而可对道路上快速移动、突然出现的物体进行实时探测,同时确保夜晚行驶的安全性。
(这里说的「高速成像」,指成像的帧率可达到每秒几万帧。——作者注)
从下图中我们可以看到,在风扇静止的状态下,摄像头和使用了面阵芯片的激光雷达都可以地看到扇叶的位置。

在风扇高速旋转的情况下,摄像头无法看清楚扇叶的形态和位置,但是基于 SPAD 单光子检测的特性,面阵芯片仍然能够清晰地看到高速运行下的扇叶。

识光的 SPAD-SoC 还能够同时输出 2D 和 3D 数据。它无需搭配摄像头、无需对数据做后处理即可实时输出固定分辨率的深度图像、信号图像和环境图像。
这款 SPAD-SoC 的操刀者,是怎样的一群人?
识光在 成⽴4 个⽉后 即完成第⼀颗芯⽚单点 SPAD-SoC SK100 的交付,并且实现 一次流片成功、⼀次点亮 。

第一款 BSI SPAD 测试芯⽚,仅 6 个⽉ 便完成设计⾄点亮,也是 ⼀次流⽚成功、⼀次点亮 。

同一时期还完成了百万级像元的大面阵 SPAD-SoC SP100 的设计

通常,一款芯片从设计到完成流片,至少需 12 个月 左右,识光能在如此短的时间里就完成多款新品的设计,这得益于识光核心团队在公司成立之前就积累的相关经验。
识光创始人,是全球范围内最早把 VCSEL+SPAD 路线商业化落地的团队的负责人,回国创业前,曾在海外完成了多颗车载大面阵 SPAD 芯片的设计流片和量产。识光各子系统负责人拥有甲骨文、英伟达、苹果等公司的超大型芯片项目实战经验,SPAD 器件负责人来自全球顶尖实验室。
芯⽚架构和数字电路负责⼈是超算 CPU 系统级芯⽚设计师,所设计的⾼精度时钟采样电路分辨率可达几十⽪秒级,且能够对数万个 SPAD 同时进⾏采样和数据处理, 这是取得强大并行采样能力和高点频的基础。同时拥有完整的车规级 SPAD 芯片设计能力。
以激光雷达系统视角定义 SPAD
相比其他 SPAD 芯⽚公司,识光团队有一个独有的优势就是: 对下游需求的理解程度更深 。
虽然定位是激光雷达上游的供应商,识光核心团队不少成员自己就有激光雷达整机系统的设计能⼒,因而,可以从更⾼的视⻆来俯览激光雷达整机设计,从最终系统需求出发,结合光学、VCSEL 等配套核⼼器件的特性,定义 SPAD 接收芯⽚架构,进⽽做到系统层⾯的性能、效率、成本最优。
这种从系统视⻆定义核⼼芯⽚的做法,与苹果⾃研 iPhone/Macbook CPU 的思路⼀致。
以下为九章与识光团队的对话实录
全场景覆盖
九章 :做成面阵,探测距离能满足车企对主激光雷达(前视)的需求吗?如果 VCSEL 的探测距离跟不上,客户买了你们的 SPAD 面阵,也很难用好啊,那你们岂不是被 VCSEL 厂商拖累了?
识光 :首先,得纠正一下:「大面阵 SPAD 的探测距离上不去」这个说法并不成立。市面上已经有 SPAD 激光雷达的探测距离可以达到 200 米@10%了。
其次,我们倒不会担心所谓「被 VCSEL 的进展拖累」。从我 2016 年开始做 VCSEL+SPAD 技术路线到今天,VCSEL 器件发展迅速,其单位光功率密度已经翻了几番,目前已经可以覆盖包含补盲和转镜等大多数应用场景,相信很短的未来就可以实现全场景覆盖。
做激光雷达行业的「高通」
九章 :你们的客户全都是激光雷达公司吧?
识光 :激光雷达公司确实是我们比较大的一个客户群,但我们同时还面向机器人和工业领域的一些方案商。随着 dtof 技术的发展,目前应用的领域越来越多,识光有足够的实力服务更多行业和消费品领域客户。
九章 :对这些公司,你们是会提供一套参考设计吧?就是说,他从你这里只买 SPAC-SoC,但发射端应该用怎样规格的 VCSEL,你们也会提建议?
识光 :是的,我们希望通过这种方式极大地降低生产制造激光雷达的技术门槛。
九章 :ToF 激光雷达中,壁垒最高的 SPAD SoC 正是你们的主业,同时呢,你们又具备做激光雷达整机的经验,那你们以后会不会做激光雷达整机呢?
识光 :不会做。我们的定位是 Tier 2,做激光雷达行业的「高通」,而不做手机厂商。
为什么会有 SiPM 这个「过渡形态」
九章 :SiPM 是由一组 SPAD 及电阻电容并联组成的,但 SAPD 输出的是数字信号,而 SiPM 输出的则是模拟信号,从输出的信号看,SiPM 要比 SPAD 阵列落后。
而后续的 SPAD 阵列又「回归」到数字信号,这也表明 SiPM 确实只是一个「过渡形态」。那为什么会有 SiPM 这个过渡形态呢?
识光 :每一次技术革新都不会是一蹴而就的,技术向下兼容的产品往往在某个特定的时间点有他存在的价值,但往往也是相对短暂的过渡性存在。
我们每天使用的计算机系统里也有很多这样的例子。
比如,LCD 显示器尽管输出的是数字信号,但在刚刚普及的时候,它也会带有 VGA 模拟接口,就是为了向下兼容此前没有 DVI 数字接口的主机设备。
【以下内容摘自 https://zh.wikipedia.org/wiki/DVI
以模拟方式发送视频资料的标准 VGA 是为了适应以 CRT(阴极射线管)为基础的显示设备而设计,然而,当 LCD 等数字化的显示设备开始实用化时,若再以模拟方式发送信号至数字显示设备,则该设备必须以特定频率将扫描线信号(模拟信号)取样再转换回成数字格式,若取样出现误差,便会导致画面质量劣化
…
并且,当信号来源为电脑时,显卡将数字的信号转换为模拟信号,再被 LCD 显示器转换回数字信号的流程显然是多余的。因此,DVI 也随着 LCD 显示器成为主流而被广泛使用。——作者注】
SiPM 之于激光雷达系统,同 VGA 接口与 LCD 显示器的关系十分类似,都是系统向数字化转型过程中的临时过渡方案。
在标准的 SPAD 检测数字化系统中,为了得到每个像素的光强信息,每个感光像素是由多个 SPAD 像元组成,而每个像元都有自己的 TDC(时间数字转换器件,直接采取光子的时间信息),这些 TDC 的数字信号通过单光子计数的方式被精确地累加并记录起来。
但对大多数激光雷达厂商来说,在从 APD 向 SPAD 切换的起步阶段,通用 DSP(信号处理单元)如何直接获取 SPAD 输出的数字信号,大家基本上都还没有成熟的方案,而 APD 时代以 ADC(Analog-to-Digital Converter,从模拟信号向数字信号的转换器)作为采样器的方案却是现成的,无需新的研发投入。
在这种情况下,激光雷达厂商找到了在核物理和医疗领域已经比较成熟的 SiPM。
SPAD 的输出波形是单幅值的,无法分辨回波强度,因此,探测端只有单颗 SPAD 的话,是没有能力带回足够多关于目标物的信息。要让光子能带回足够多的关于目标物的信息,就必须将多个 SPAD 并联,使输出波形变为多幅值的,这样,回波强度就可分辨了。
在 SiPM 方案中,多个 SPAD 像元组成一个像素,但 SPAD 输出的 0-1 信号并不会被直接进行时域信息采集,而是先通过电阻电容的并串联将多个 SPAD 的输出信息混叠,形成近似而非精确、且易受干扰的模拟电压信号。
由于是输出的是模拟信号,所以,后续的电路组件可以复用上一代模拟激光雷达的 ADC 芯片和信号处理算法,实现了 SPAD 器件在技术上的向后兼容。
九章 :听上去,输出信号变成模拟信号,其实是为了「迁就」作为采样器的 ADC,因为 ADC 跟 SiPM 端相连的就是模拟信号接口?
识光 : 是的。此外,ADC 采样后的数据处理算法,也会有一定程度上的复用,因为 SiPM 具有和模拟 APD 感光器件类似的模拟信号特性。
九章 :为什么通过串并联,就有可能将输出信号由数字信号转换成模拟信号了呢?
识光 :电阻电容和信号的串并联,是相对粗糙的一种从数字信号到模拟信号的转换方式。SPAD 输出的 0-1 的脉冲信号可以跨过隔绝直流信号的电容,然后通过电阻转换为电流信号之后汇聚集合,再通过汇聚点后的另一个电阻或者夸阻放大器(TIA)转换成电压模拟信号。
九章 :但这种转换,一定也造成了不少牺牲吧?
识光 :的确,上面提到的电阻电容因为体积限制,在并联时往往需要做片上集成,而硅半导体工艺里小型阻容感分立器件的个体差异会非常大,所以,输出电压的模拟信号充其量近似于光子数量且非线性,无法做到对信息的精确采集。
另一方面,后续数字到模拟的转换(ADC)会有更多的损耗和失真。
识光的全数字化方案
九章 :到什么时候,SiPM 这个过渡形态的技术会退出舞台呢?
识光 :我们接触的所有激光雷达客户里,除了正在量产收尾的项目,已经没有客户在新开 SiPM 技术路线的研发项目了。
所有的电子产品都会经历从模拟到数字化的演进,这个演进一旦完成了,传统的模拟技术很快就被替换掉了。就像是从磁带随身听到后来的 MP3,因为 MP3 可以做到数字化芯片化,一夜之间深圳的很多小厂都可以做出音质可以媲美但是体积、价格都远远好于传统磁带机的产品,很快随身磁带机就失去了这个垄断了很多年市场。更没有厂商会在之前的领域继续投入资源研发新产品。
九章 :你们所强调的「全数字化」,其实主要就是指在探测器端和采样器端都砍掉了「模拟接口」,而是直接输出数字信号,后面 TDC 再直接采数字信号?
识光 :是的。从光子被 SPAD 器件转化为电信号后直接通过 TDC 记录光子到达时间,再通过我们独有算法的数字信号处理,再到测距结果的标定补偿,整个过程全部都数字化,并在一颗芯片内完成。
九章 :全面数字化的 SPAD 阵列,相比于当前模拟信号的 SiPM,优势主要体现在哪些方面?
识光 :所有的电子产品,基本都经历了从模拟到数字的升级过程。我们以之前的录像带和后来的 MP3 做个简单的对比,可以发现,从模拟信号到数字信号,一个最直观的变化是体积会大幅度缩小。同理,在激光雷达中,相比于 SiPM 方案,SPAD 阵列方案会使整机系统的体积进一步下降。
数字化的另一个特点是,没有了 数模—模数 的转换,原始信号的失真更小,因而可以被更准确地保留了下来。
TDC 的时间检测精度可以达到几十皮秒甚至更小的数量级,而 ADC 的采样率往往只能达到纳秒量级,所以,原始数据的时间精度有几十倍甚至百倍的提升。可以理解为,从西式菜谱里的「一茶匙盐」精确到了化学手册里「2.53 克氯化钠」。
九章 :之前的模拟信号,就好比是,我去抄你的试卷,但一不小心就会抄错;现在的数字信号,就相当于我直接把你的卷子复印一份?
识光 :对。也可以理解为,模拟传输更像是我拿手机对着你的屏幕去翻拍,出来的效果就会差很多;而数字传输则是,我们照了一张合影,然后你直接原图微信发我。
九章 :SPAD 阵列的信噪比应该也比 SiPM 高吧?
识光 :会的。
相较于 SPAD 单光子计数,SiPM 因为属于分立元件激光雷达架构,对光信号的转化不够精确高效,所以,往往单个像素需要更大的感光靶面来实现同样的效果,这就会有更大的暗计数——即感光器件内部产生的噪声。另外,在 SiPM 输出的模拟信号中,所有信号无论激光回波还是噪声都被简单地糅在一起,无法区分处理。
但在单光子计数的 SPAD-SoC 里,各种信号可以数字化地根据时间、位置、强度等特征进行分类存储并处理;再结合高性能的片上算法,激光回波信息就很容易在噪声信号中被识别出来。
也正是因为这个原因,SPAD-SoC 激光雷达系统对发射功率和接收光孔径的要求要明显小于 SiPM 激光雷达系统。所以其体积、功耗和成本都有着显著的优势。
大面阵与小面阵
九章 :很多公司都将 SPAD 面阵分为大面阵(主要面向车载场景)和小面阵(主要面向手机等消费级产品),两者的主要区别就在分辨率和探测距离吧。还有其他的吗?
识光 :没错。大面阵和小面阵主要是应用场景、分辨率和探测距离的区别,但是内部集成度和设计难度上的也还是有很大差异。这里可以类比 CPU,就好像今天还在被广泛使用的 8051 单片机和很多我们同事参与过的手机 AP 和超算 CPU 都可以被称为是中央处理器,但它们有质的区别。
首先,小面阵 SPAD 只需要完成光信号的原始数据采集,信号处理可以交给外部处理器(手机和扫地机器人普遍都是这个架构),但车规大面阵就不行。
因为,车规大面阵的分辨率高 (100x+),探测距离远(10x+),所以它的原始数据量往往是消费类小面阵的千倍甚至万倍以上,达到几百 GB 甚至 TB 每秒的量级,而目前的车载网络的带宽远远不够处理如此大的数据量。所以,大面阵产生的数据必须在「本地」由大面阵芯片自己先处理完,然后再把提取出来的距离和信号特征信息传输给域控制器。
其次,大面阵既要求分辨率足够高,又要求探测距离足够长,还要信噪比较低,这对数据采集和处理都提出了很高的要求。
在发射端元器件及功率既定的情况下,激光雷达的探测距离主要取决于反射信号的光功率,而反射信号的光功率又跟传感距离的平方成反比。因此,既要准确检测 0.1 米的障碍物,又要在 100 米处的时候也要看得很清楚,这是 1 千倍的差距,而对反射信号的光功率来说,这意味着 100 万倍的动态范围,其中的难度可想而知。
还有,大面阵的芯片尺寸本身也带来了物理层面的挑战。
芯片设计面对的本质上是一个二维的平面的世界,伴随芯片面积的增加,信号通路的拥挤程度是几何级数上升的。而且,面阵芯片中的 2D 寻址又会将设计难度推向一个新的高度。
信号通路,供电网络、时钟网络、发热管理、DFM 等等一系列问题,在大芯片设计中都需要拥有丰富实战经验的资深专家来解决,这也是我们的优势所在。
总之,SPAD 芯片从小面阵到大面阵,难度的升级,就好比盖楼:如果只打算盖 10 米高的楼,用木材就可以盖出来,农耕时代就是这么做的;但如果想盖一个 100 米或 200 米高的楼,它就一定需要钢筋混凝土、力学仿真、大型工程机械等等,它背后需要工业化和一整套技术和能力。
关于片上算法集成
九章 :将测距算法集成到 SoC 上,有什么壁垒吗?
识光 :如果你之前没有丰富的整机系统经验,对激光雷达需要怎样的测距算法不是很了解的话,贸然上一套算法,如果算法没写好,可能导致芯片流片失败。
我们团队的成员已经做过很多代这种集成了测距算法的芯片,并且,积累了丰富的实战经验,得到客户的认可,所以,我们就有底气这么干。
九章 :那开发这套测距算法的壁垒在哪里呢?
识光 :需要对模拟电路及 SPAD 器件都有很深的理解,然后再根据它们的特性来调制测距算法;此外,还需要掌握跟激光雷达系统设计的能力。
为什么要采用 3D 堆叠工艺
九章 :好几家做 SPAD 的公司都在采用 3D 堆叠工艺,为什么都会这样?因为对集成度要求更高,其他工艺满足不了需求吗?
识光 :小面阵可以不这么做,但大面阵都必须要通过 3D 堆叠工艺来实现。

大面阵 SPAD 芯片需要同时满足以下三个条件:
i. 处理电路(上图中深灰色部分)面积要比较大,而且需要与它对应的淬灭电路(浅灰)之间要建立数据连接;
ii. 淬灭电路(浅灰)跟 SPAD 像元(黄色)的距离不能太远——否则会影响时间测量的准确性和系统时间;
iii. 每两个像素(每个像素里包括 N 个 SPAD)之间的间隔不能太远——否则,就会存在填充因子过低的问题,从而影响到探测的灵敏度。
单晶元工艺下,单独满足其中的一条,或同时满足其中的两条,都不难,但要同时满足三条,就特别难了。这就是个「不可能三角」。
典型的单张晶元设计如上图(a,b)这两个例子。a 设计可以满足 i, ii,但是填充因子很差;b 设计可以满足 ii,iii,但在大面阵设计中因为绕线资源的限制很难满足 i。
只有 3D 堆叠的两张晶元键合(c,d)才可以比较好地解决这个问题。
适应性
九章 :当前,激光雷达的主控芯片 FPGA,因为可编程,所以对多种技术路线的适应性强。那识光做的 SoC,如何保持这种对不同技术路线的适应能力呢?
识光 :我们的信号处理单元 RSP(Ranging Signal Processor)是可编程的——RSP 分软硬两部分,其中软的部分可以用通用语言进行编程,硬的部分也可以通过寄存器灵活配置功能和参数。
如从 CPU 到 FPGA 到片上算法,灵活度依次递减,但是效率一定是依次递增的。激光雷达内部集成 FPGA 是以非常高的成本和功耗为代价的,我们的做法是,在了解绝大多数客户需要什么样的算法的基础上,把效率做到最高,然后让它灵活可配置。
客户的切换成本
九章 :对于用惯了 APD 的激光雷达厂商来说,向 SPAD 和 SiPM 切换面临着一个巨大的挑战:对信号的处理这块需要极大的转变。这可能也是为什么目前真正量产的不多的原因。那识光的 SPAD-SoC 方案有什么办法降低客户的「切换成本」吗?
识光 :我们其实是希望能帮客户降低从 APD 或者从 SiPM 切向 SPAD—SoC 的门槛的。
有的客户是之前对激光雷达没有积累、刚入行做激光雷达的公司,我们可以提供系统层面的建议;而即便客户是一家头部的激光雷达厂商,我们能提供的也不止是 SPAD-SoC 芯片,我们也还是可以输出一些其他 Know-How 给他们的,毕竟,在 VCSEL+SPAD 这个方向上,我们团队的经验积累是最多的。
几个工程细节问题
并行处理
九章 :SPAD SoC 可同步并行处理的通道数量,是决定系统帧率、点频、探测距离、分辨率等系统指标的关键因素,但它又会受到芯片功耗、面积、走线难度、时钟设计难度等因素的限制。那识光在 SPAD-SoC 的过程中是如何权衡并行处理相关问题的?
识光 :首先,我们会根据自己对激光雷达系统的理解来决定采样的帧率、点频、探测距离等参数,然后根据客户的需求来优化芯片整体的面积和功耗,从而根据我们的经验来制定一个最高效的架构。
噪声
九章 :SPAD 方案,在提升探测性能的同时,噪声的增加是不可避免的吗?还是说现在已经有办法可以避免了?
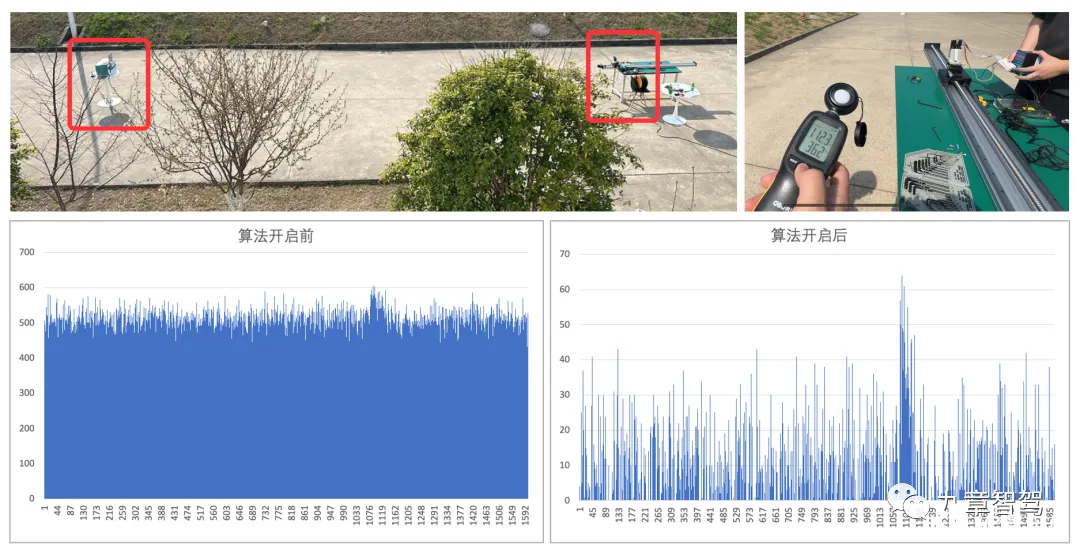
识光 :激光雷达本身带来的噪声,是可以通过技术手段避免的,但环境光噪声必然会随着探测性能的提升而增加。不过,一些巧妙的光学设计是可以进一步抑制环境光噪声,这类光学设计往往需要接收芯片的配合。另外,片上算法也会对这类问题有显著的改善。
九章 :高温也会进一步影响 SPAD 的噪声水平,在原有的高后脉冲效应、寄生脉冲、串扰等不利因素的基础上,加剧性能的恶化。目前识光已经克服这些问题了吗?
识光 :我们在设计 SPAD 器件结构的时候会尽量把暗计数压低,同时也会在片上做相关的噪声过滤算法。
死区时间
九章 :SPAD 的 "死区时间"(dead time)即在每次探测到一个光子事件之后,SPAD 探测器需要恢复其正常工作状态所需的时间间隔(通常是几纳秒)。在这个死区时间内,探测器无法再次探测到新的光子事件。如果背景光噪声较强,SPAD 会由于频繁的误触发而处于一种「疲劳」的状态,点云噪点会明显增多,探测距离也会因此衰减。这一问题,识光是否已经解决了?
识光 :这其实是一个动态范围的问题。我们通过在电路及系统设计层面来增加 SPAD 的动态范围,就可以保证在环境光干扰之下的信号仍然可以被系统接收到。
九章 : 一方面,需要通过死区时间来抑制后脉冲率,另一方面,死区时间又会影响到探测次数,那如何在死区时间的控制上平衡这两个目标?
识光: 其实,后脉冲在 SPAD 器件设计中是可以被优化的,如果 SPAD 做得足够好,后脉冲率是很低的,那所需死区时间的值就可以很小。当然,要把死区时间的值做小,淬灭电路面积就需要变大,功耗会升高。这里面需要优化的技术点非常多。
后脉冲效应
九章 :SPAD 的「暗计数/暗噪声」和「后脉冲效应」都可能会导致误报,从而降低探测稳定性。那么,在抑制「暗计数」和「后脉冲效应」方面,识光采取了什么措施?
识光 :暗计数我们现在可以做到 100 Hz 以内,后脉冲率小于 1%,这些基本上已经已经不会对使用产生影响。
填充因子
九章 :「填充因子」是决定探测器的感光灵敏度的一项关键因素,那在提升 SPAD 探测器的 "填充因子"方面,识光做了哪些努力?
识光 :采用微纳光学结构、微透镜等,这里面会有一些独特的散射结构,光进去之后,可以被散射到硅里面,这样确实能增加光的吸收效果。
光子暗计数差
九章 :当多个光子几乎同时到达 SPAD 阵列时,只有第一个光子的计数会被记录,导致其他光子的计数被漏掉或低估。这可能导致真实光子计数的误差,从而影响激光雷达系统对目标的检测灵敏度和精确性。识光是否已经解决这一问题?
识光 :SiPM 容易产生这个问题,多个 SPAD 器件连接在一个 TDC 采样通道上的时候,也会产生这种问题。但我们的芯片结构和算法可以保证每个信号都被采到,这样就不会有这个问题。
抖动效应
九章 :抖动效应(时间抖动)会对 SPAD 探测器的时间分辨率产生影响,进而影响到探测距离的精确度。那么,为减少抖动效应带来的不利影响,识光采取了哪些技术措施?
识光 :首先,我们通过优化的 SPAD 设计,降低了 SPAD 本身产生的时间抖动;其次,我们通过优化的前端电路和计时电路设计,将时间信号在传输和采集过程中的抖动保持在较低水平。
反射率标定
九章 :有激光雷达整机厂商反映,相比于 APD,SPAD 针对目标物的反射率很难标定准确。针对这个问题,识光这边有解吗?
识光 :用我们的片上测距算法的话,在 SPAD 里面也能做出非常不错的反射率信息标定。
增益能力
九章 :有激光雷达厂商反映,目前,他们用过的 SPAD,增益能力不能满足系统对测试距离的要求,也不能匹配激光器功率。这一问题,识光能解决吗?
识光 :根据过往经验,只要搭配合适的片上算法和系统设计,VCSEL+SPAD 方案就可以在激光器发光功率特别低(瓦数为个位数)的情况下,还能探测到 150 米处甚至更远 10%反射率的目标物。
探测效率(PDE)
九章 :SPAD 的探测效率(PDE)还有提升空间吗?如果有,主要靠什么?
识光 :有,但当 PDE 达到了一定的性能水平,再提升 PDE 对整个系统的帮助不再那么明显。
因为,PDE 是跟 SNR(信噪比)的平方成正比,也就是说, PDE 从 2%增长到 32%,增长了 16 倍的时候,SNR 增长了 4 倍,探测距离也因此而增长了 2 倍,这个成绩是很了不起的;但 PDE 从 30%增长到 60%,只增长了 2 倍,SNR 增长了 1.4 倍(根号 2),距离的变化则只有 1.2(根号 1.414)了,提升有限。
可见,PDE 在增加到一定值之后,再继续提升,意义已经不大了。
【严格地说,上面的「增长了多少倍」这种表述是不严谨的,比如,「增长了 16 倍」实际上增长了 15 倍,准确的说法是「增长至前值的 16 倍」——类似于于英文里面的 increase to 与 increase by 的区别,但为表述简炼,本文仍沿用这一许多人都在用的表述方法。——作者注 】
附:关于「2D 寻址」
之前的机械式或现在的混合固态激雷达(收发系统是点状或线列),一次只能探测一个点或一条线,但可通过运动的扫描部件实现对一个面的探测;而到了 Flash 阶段(收发系统是面阵)的阶段,在最理想的情况下,一次就能探测一个面。
「一次探测一整个面」这种理想局面的出现有一个前提:面阵光源中的所有激光器同时开启,对整个目标探测区域打光,探测器中对应的感光器件接收反射激光信号,即 1 次打光实现对整个视场的探测。
然而,受激光器发射功率和接收端信号并行处理能力等因素的限制,目前还无法做到「所有激光器同时开启」。主流的做法是,将发射端分成若干个分区, 依次开启 其中一个分区,接收端开启与之对应的感光器件,直至遍历整个探测区域。
分区开启,又分为 1D 寻址和 2D 寻址,跟摄像头一样,目前 Flash 激光雷达主流的扫描方式是 1D 寻址。如下图左侧:
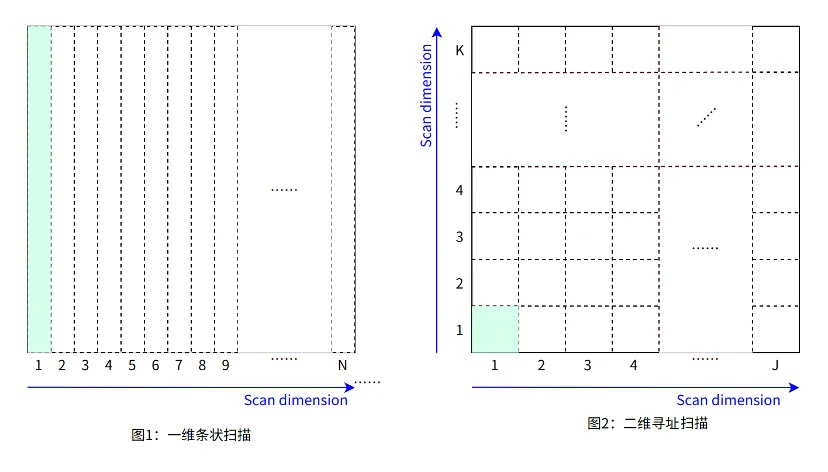
1D 寻址即激光器只在 X 这一个维度上扫描,激光器和探测器对各分区「依次开启」,图中用浅蓝色标出的「长条」就是当前开启的区域。
2D 寻址,则是指系统可在 X 和 Y 两个维度上同时扫描,图中用浅蓝色标出的「方块」就是当前开启的分区,系统按一定的顺序依次开启每个分区以完成对整个视场的扫描。
1D 寻址一有一个无法避免的问题就是: 串扰 。
之前,有多家激光雷达整机厂商反映,在使用 SPAD 技术时,如果扫描的近距离目标周围存在高反射率的物体(例如镜面、路标、金属等,简称「高反物体」),会引起串扰及膨胀的问题。
串扰,即一个通道的激光脉冲信号对其他通道产生的干扰;膨胀,通常表现为一个正常高反指示牌的点云轮廓会向四周扩散,呈现出来一个比真实物体更大的点云形状,且多出来的点云部分的反射强度表现会偏低。(下方左图为「膨胀」点云图,右图为正常点云图)
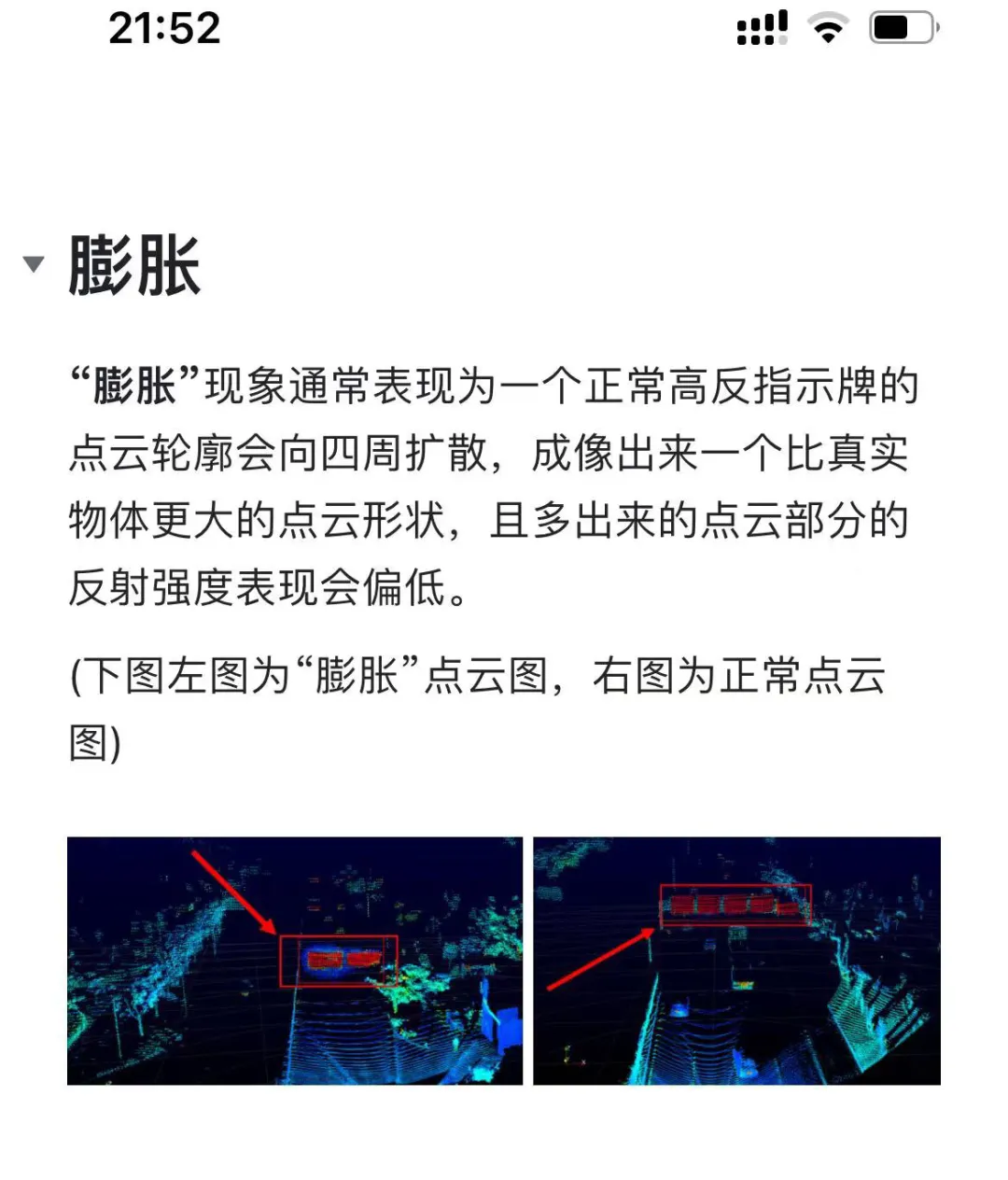
可以说,对 SPAD 来说,高反物体其实就是一个「污染源」。「高反污染」问题,已经成为制约 VCSEL+SPAD 路线发展的一大障碍了。
但之所以这两个问题比较普遍,是因为当前的 SPAD/SiPM 采用的都是 1D 寻址的方案;如果改用 2D 寻址方案,问题就没有这么严重了。
在 1D 寻址的方案中,SPAD 每次开启的区域是以一个「大长条」为「最基本单元」的,在遇到高反物体时,图一中「长条」上只要有一个点被污染了,整个「最基本单元」就都受影响了。由于每个「最基本单元」的面积比较大,那这个「局部损毁」对激光雷达整体探测能力的影响就比较大。
在 2D 寻址的方案中,SPAD 每次开启的区域是以一个「小方块」为「最基本单元」的,在遇到高反物体时, 照样存在某个小点被污染导致整个「最基本单元」受影响的问题。但由于每个「最基本单元」的面积比较小,那这个「局部损毁」对激光雷达整体测距能力的影响就微乎其微了。
(图二中的小方块,未必一定是正方形,但总的来说,形状越接近正方形,就越容易减少污染源带来的不利影响。)
识光称:
行业里公认 2D 寻址是解决「高反污染」问题的「最佳方案」。
此外,在分区数量相同时,2D 寻址 VCSEL 激光器打线的 pad 更宽,更容易布线,而且同一分区激光器发光的一致性更好。
2D 寻址的另外一个好处是,可降低激光雷达收发端的成本。
激光器和探测器的分区开启,需要好多开关来配合。但不同方案所需要的开关数量是不一样的。
在 1D 寻址方案中,每开启一个分区,就需要 1 个开关,如果需要开启 100 个分区,就需要 100 个开关;但在 2D 寻址方案中,我如果开启 100 个分区,我可以选择 X 维的 10 个开关跟 Y 维的 10 个开关来配合,总共只需要 20 个开关,这就节省了 80 个开关的成本。
(1D 寻址和 2D 寻址的分区数量往往是一样的。这是因为在 1D 和 2D 的分区下,整体光功率是一定的,每个区对应的光功率也是一样的,所以分区数量是一样的。——作者注)
发射端的 2D 寻址方案,VCSEL 龙头 Lumentum 已经做出来了。但探测端的,业界的人差不多的都意识到了,但目前还没有看到真正落地的,因为做起来实在太难了。
1D 寻址的接收芯片中数据的流向是固定的,就是跟分区长边垂直的方向;但 2D 寻址的 SPAD-SoC 需要数据流同时流向 X 和 Y 两个方向,并且要可以灵活处理期间的穿插和重叠,是一个非常大的挑战 。
但识光称已经克服了这些困难。