

作者 | 朱世耘
编辑 | 邱锴俊
奔驰并不打算仅仅做一个追随者。
2023 年下半年,梅赛德斯-奔驰(下称奔驰)将在中国率先落地高速领航功能,由此成为首个量产领航辅助驾驶的豪华品牌。
随后,基于 MMA 平台打造,搭载奔驰 MB.OS 的车型将具备城市领航的能力。
9 月 4 日在慕尼黑车展上,MMA 平台首款车型——CLA 级准量产概念车全球首发。 基于 MB.OS,奔驰 OTA 的频次将向着每月 1 次的目标全面提速,在全球范围内落地实现软件定义汽车。
梅赛德斯-奔驰集团股份公司董事会主席康林松在采访中明确:「 我们在中国开发的任何功能和技术,都不仅仅与中国相关。将中国创新引入德国、美国、瑞典等更多市场是现在的趋势。 」
向来被认为因循守旧的传统豪华品牌果真有这样的速度和实力吗?奔驰要如何打好智能化的中国战役?
用数学跑通高速领航
奔驰的高速领航功能可以在全国的高速和城市快速路上,实现点对点的领航辅助驾驶。
但与其他辅助驾驶技术不同的是,奔驰这套领航系统并未使用高精地图和神经网络算法,主要基于立体双目摄像头、全景摄像头、毫米波雷达等传感器,以及部分车道线、固定道路设施地图信息完成。
换而言之,奔驰使用了完全不同的技术方案来跑高速,用 25 年的数学积累给「神经网络们」一些小小的震撼。
奔驰高速 NOA 实拍
目前绝大部分自动驾驶量产玩家通过基于深度学习的机器视觉,在 2D(X、Y 向)完成感知任务。一旦出现「没学过」的目标(如异形障碍物)、无纹理的目标(融入蓝天的白色卡车)往往无法识别,影响体验甚至酿成事故。
因此,无需分类直接探测的激光雷达,和先验信息丰富的高精地图就成为各家落地领航能力的重要补盲「器材」。
立体双目摄像头则是「摄像头+激光雷达」的天然的「3D(X、Y、Z 向)传感器」,能够直接给到深度(Z 向)信息, 但基于数学方法进行的视差估计和在线标定上极难,需要大量的实践积累。
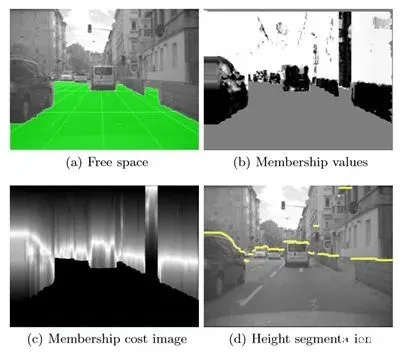
奔驰在 1999 年开始研究立体双目,直到 2013 年才上车 S 级,并在期间提出了大名鼎鼎的 Stixel (Stick + Pixel)方法,用于估计障碍物与路面之间的边界和障碍物高度,与雷达融合后形成可行驶空间。
Stixel 与占用网络、数字高程图并列为 GOD(通用障碍物)检测的三大经典方法。
在结构化道路上,通用障碍物检测一直限制着高速领航表现,因为神经网络的训练数据无法覆盖每一种「自由的轮胎」、「飞舞的塑料袋」等极端场景。而 数学则能直接检测出「视野」范围内障碍物的存在。
事实上,在中国基于供应商能力,利用神经网络跑出高速领航行业平均水平并不困难,但奔驰为何如此「old school」?

「 豪华绝不能仅仅依赖软件,只有实现软硬件完美融合的产品才能为客户带来完美的体验。 」梅赛德斯-奔驰股份公司首席软件官欧孟宇在采访中向《电动汽车观察家》表示。
神经网络具备「高上限、低下限」的特性。因此特斯拉可以用 144Tops 算力和八个摄像头实现城市领航,而很多量产玩家仍需高精地图、激光雷达,200-1000Tops 算力来跑高速。
奔驰基于数学方法的软件算法与立体双目、毫米波雷达则已磨合二十多年,相比全行业才起步不久的神经网络具备更好的成本、使用上的体验优势, 而客户体验才是奔驰最为看重的部分。
这并不意味着奔驰将固守现有优势不放。
欧孟宇表示 ,奔驰正与英伟达合作,在智能驾驶相关算法领域进行转型。智能驾驶辅助系统的算法越来越多转向由数据驱动的神经网络算法。这个转型正在进行中,相应的系统将随着首批 MMA 平台的车型搭载,其中也将包括城市领航功能。
MB .OS+AI 的未来奔驰
更值得一看的,是看不见的底层技术。
今年年内,奔驰将发布 MB.OS 前身——第三代 MBUX 智能人机交互系统,其中一个名为「场景」的功能颇为引人关注。
相较于「小憩、女王」等由车企软件工程师预制的各类智能座舱场景体验,奔 驰的」场景「功能为用户自己提供了自定义编程的自由。
用户可根据自己在具体场景中的具体需求(如上班喜欢先开窗通风、打开调配广播、在路上预定一杯咖啡)进行设置,设置后车辆会进行自动响应。
甚至不需要用户亲手设置。基于奔驰整体 OneAI,奔驰中国研发团队自研了本地的智能引擎 ABACUS「算盘」,采用云端 AI+本地数据的「车+云」混合架构,对用户习惯进行学习后提供智能推荐,并能持续进化。
智能汽车的概念在中国市场已不新鲜。但直到面向 SOA 服务的软件基础架构,和采用域控、域融合和以太网通讯为主的新一代电子电气架构在 2024 年逐步规模化量产。 「千人千面、场景自定义、场景可编程」这些智能汽车的特性才从概念变为现实。
奔驰 MB.OS 操作系统概念演示
因为「编程」的前提是车内软硬件系统解耦,打包成为原子服务能力,供开发者、用户,甚至 AI 随时调用组合。软硬解耦依赖广义整车操作系统来实现,在奔驰这里叫做 MB.OS,将同时覆盖电动化和燃油动力车型。
欧孟宇表示,搭载在 MMA 平台上的 MB.OS 会通过横向集成的方式,将信息娱乐、自动驾驶、车身控制及驱动传动四大系统域全面打通,为软件定义汽车提供更高的自由度。
MB.OS 也为奔驰带来了「自由」。

在欧孟宇看来,数字豪华一方面是应用显现的数字技术体现奔驰式的豪华体验,另一方面,「 豪华也必须是本地化的、量身定制的,客户在车内可以便捷使用他们日常习惯的数字生态圈中的各种应用和内容。 」
由于软硬件深度耦合,为本地化用户量身定制功能,在过去对跨国车企而言,无论是成本还是工程量都是不可想象的。
但 MB.OS 将底层硬件、软件层、驱动层、中间层、应用层进行分层解耦,极大的释放了各地研发的「权限」。 中国工程师调用车灯功能时不再需要德国总部的批准,中国引入本地科技合作伙伴的能力也不再需要德国总部改代码。
这意味着更低的「上新」成本和更快的「上新」速度。
欧孟宇表示, 随着 MB.OS 的落地,奔驰整车 OTA 更新频次将提高到每年 4 次,并向着每月一次的目标不断提速。

中国研发,在中国为全球
奔驰组织内部的「OTA」也正在发生。
奔驰中国研发工程师分享了康松林在上海车展期间,对中国团队与本土供应商合作开发的卡拉 OK 和车道级导航功能大为赞赏。
此次慕尼黑车展上,康松林便表示中国研发的卡拉 OK 功能也将引入德国、韩国等更多市场。
「 中国汽车产业具有强大的创新力和竞争力。仅仅把在中国进行的创新保留在中国市场,这样是没有意义的。当中国研发团队开发出新技术时,我们希望像德国团队那样,将创新带给全世界,即便是很小的功能也如此。 」 康林松表示。
导航辅助驾驶是由中国团队主导开发,第一个率先在中国上市的智能驾驶产品;今年,中国研发与思必驰合作,首次与本土供应商一起开发全球语音服务,这也是奔驰历史上第一次由中国主导,为全球研发服务;
中国研发团队也已经接管了全球负责后座娱乐开发的职责;

「整个中国研发团队的职能与以前相比有很大的转变,此前主要负责项目的本土化落地,更多从事测试相关的工作。然而,近年来,中国研发团队的工作不仅仅聚焦本土化项目落地和测试,而是 更多地参与到全球的研发项目中,并在一些项目中扮演主导角色。 」梅赛德斯-奔驰(中国)投资有限公司执行副总裁、奔驰中国研发自动驾驶及车联网负责人王忻表示:「 这标志着我们在产品创新方面拥有了更多的自主权,在全球研发中扮演着越来越重要的角色。 」
在开发新技术、新功能外,中国研发团队还有技术内化的任务。
例如将奔驰底盘调校、操控质感等传统机械特性技术积累,通过软件转化为电动时代的奔驰特色。「 我们的目标是通过软件和数字孪生技术,让这些特性和质感同样融入到我们的电动车型中。 」王忻表示。
过去三年间,奔驰中国研发团队新增超 1000 名研发人员,并将在今年年底扩充至 2000 人。新增人员大部分集中在电驱系统管理、车联网、自动驾驶等软件开发领域。 奔驰未来将进一步扩大在华投资,尤其是研发领域的布局。
「当我和我们的中国团队面对面时,我真切感受到了这种创新速度。而我们想要保持竞争力,就恰恰需要这种中国速度。」康林松在采访中说道:「因为,创新是我们的基因,也是我们的工作,在奔驰中,不断超越奔驰。」

















