作者:李晶
前述
前段时间有幸参加了由涅槃汽车主办的《2021 智能汽车电子电气架构与软件开发者大会》,会议上英特佩斯(IntrepidControl Systems)分享了《车载以太网测试场景及方案》的专题,让我受益和感想颇多,我们知道,近年来,汽车电子电气架构、新软件架构及车载网络的发展都非常迅速,我们这些汽车电子从业者应该感受最为真切,技术发展的日新月异主要由这几年汽车智能化、网联化、电动化和共享化的发展趋势推动。而车载以太网技术就是支撑新四化的重要一环,下面我将从原因和技术两方面做下简要总结。
原因分析
新电子电气架构的变革需求
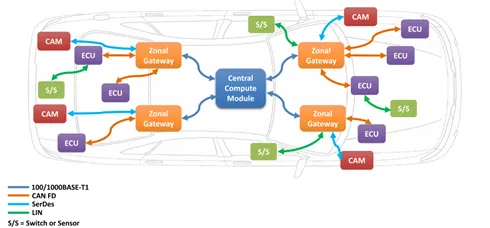
首先汽车新四化的趋势,使汽车电子电气架构从当前分布式向域集中甚至中央计算单元发展。
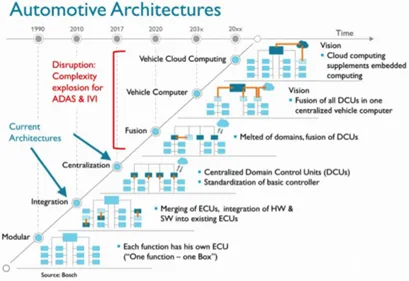
平均来说当前汽车大约采用几十甚至超过上百个 ECU 连接到各种总线上,一直遵循着 「一块功能一个盒子」 的分布式架构模式。在这样的分布式架构下,每增加一个复杂功能,就需要升级相关多个控制器,增加了多方的交流和维护成本并进一步增加系统的复杂性。
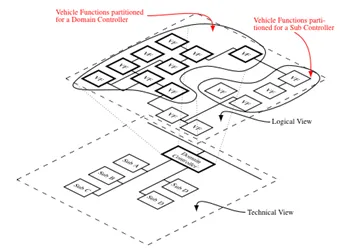
随着新四化的发展,软件在汽车中的价值比重将越来越高,以当今汽车包含的软件代码行数(SLOC)为例,2010 年,主流车型的 SLOC 约为 1000 万行;到 2016 年达到 1.5 亿行左右。面对汽车功能和软件复杂度的提升,电子电气架构必须先行变革,因此域控制的概念近两年来越来越热,所谓的域控就是将整车划归为不同的区,如动力域、车身域、底盘域、娱乐域等,每个域只挂载单个控制器来负责所在域的功能,从而降低控制器数量和整车网络拓扑复杂度。而近年来多核异构芯片、Hypervisor 等技术都从软硬件方面为域控制发展和应用提供了支持。
将来随着功能的进一步整合,硬件计算能力的进一步提升以及先进传感器等技术的发展,整车架构将向中央计算单元发展。
新电子电气架构的变革需要车载以太网的技术支撑。
在基于信号通讯的基础上引入面向服务(SOA)的通讯
未来的汽车将成为搭载全新差异化元素的平台。这些差异化元素可能包括最新的车载娱乐系统、自动驾驶和智能安全等以 「高容错性」 为根本的功能。软件将通过智能传感器与硬件整合,进一步深入数字堆栈。堆栈之间将完成水平整合,并添加新层,从而将整体结构转化为 SOA。

基于信号的通讯是目前车载总线普遍采用的,如控制器之间通过 CAN 总线进行的信息传输就是典型的基于信号的通讯。

而 SOA 是一种软件架构,同时也是一种软件设计方法和理念,在 IT 领域已有数十年的应用经验。SOA 具备 「松耦合」、「接口标准可访问」 和「易于扩展」 等特点,使得开发人员能以最小的软件变更应对迭代多变的客户需求。汽车引入 SOA 主要有如下优点:
-
服务高内聚,软件易重用。
-
服务的灵活部署。
-
软件更新升级更快捷。
基于上面的介绍,基于信号的通讯方式支持的数据类型简单且可扩展性差,适用于有限大小数据交互的应用场景。而诸如自动驾驶等先进应用场景加入后,大量数据的动态交互必须采用面向服务的通讯方式以提高通讯速度和效率。因此整车通讯在基于信号通讯的基础上,必须引入 SOA 的通讯支持。而 SOA 的支持则必须需要车载以太网技术。
车载以太网将成为整车通讯网络的主干网
基于上述汽车 E/E 架构和功能的复杂度提升而带来的对车辆数据传输带宽提高和通讯方式改变(基于服务的通讯 - SOA)的需求,车载以太网将逐渐成为汽车总线的主干网。

而车载以太网由于其特殊的应用场景,其跟我们常接触的以太网有什么区别和联系呢?下面我简单介绍下,首先在介绍车载以太网的网络分层模型时,我们说下 OSI 七层网络模型(OSI=OpenSystems Interconnection),OSI 七层网络模型互联网发展过程中一个很重要的模型。作为一个理想的网络参考模型,TCP/IP 模型是已经被实际广泛应用于因特网的网络分层模型。TCP/IP 模型没有对 OSI 的 5~7 层做严格区分,统称为应用层。

车载以太网是基于 TCP/IP 的网络分层模型,并由 OPEN 和 AUTOSAR 等联盟对以太网相关协议进行了规范和补充。

车载以太网的物理连接:从硬件的角度看,以太网接口电路主要由 MAC(Media Access Control)控制器和物理层接口 PHY(Physical Layer,PHY)两大部分构成, MAC 及 PHY 工作在 OSI 七层模型的数据链路层和物理层,PHY 和 MAC 之间是如何传送数据和相互沟通的呢?MAC 与 PHY 之间通过两个接口连接,分别为 SMI 接口和 MII 接口。

MII(Media Independent Interface)即媒体独立接口,MII 接口是 MAC 与 PHY 连接的标准接口,以太网 MAC 通过该接口发出数据帧经过 PHY 后传输到其他网络节点上,同时其他网络节点的数据先经过 PHY 后再由 MAC 接收。MII 是 IEEE-802.3 定义的以太网行业标准,MII 接口提供了 MAC 与 PHY 之间、PHY 与 STA (Station Management) 之间的互联技术,该接口支持 10Mb/s 与 100Mb/s 的数据传输速率,数据传输的位宽为 4 位。「媒体独立」 表明在不对 MAC 硬件重新设计或替换的情况下,任何类型的 PHY 设备都可以正常工作。802.3 协议最多支持 32 个 PHY,但有一定的限制:要符合协议要求的 connector 特性。
SMI 叫串行管理接口,以太网 MAC 通过该接口可以访问 PHY 的寄存器,通过对这些寄存器操作可对 PHY 进行控制和管理。SMI 接口包括 MDIO(控制和管理 PHY 以获取 PHY 的状态)和 MDC(为 MDIO 提供时钟)。MDC 由 MAC 提供,MDIO 是一根双向的数据线。用来传送 MAC 层的控制信息和物理层的状态信息。MDIO 数据与 MDC 时钟同步,在 MDC 上升沿有效。
由此可见,MAC 和 PHY,一个是数据链路层,一个是物理层;两者通过 MII 传送数据。 因此 Ethernet 的接口实质是 MAC 通过 MII 总线控制 PHY 的过程。

MII 接口后续又衍生了很多其他版本,如 RMII、GMII、SGMII、RGMII 等。这里简要介绍其中的 MII 和 RMII,如下图所示。MII 共使用了 16 根线。其中 CRS 与 COL 只在半双工模式有效,而车载以太网固定工作在全双工模式下,故应用在汽车环境需要 14 根线。
RMII 是精简版的 MII,数据发送接收均为两根,相比 MII 减少了 4 根,另外它整合或减去了一些线,最终 RMII 只有 8 根线 RMII 的接口如下:

在实际的设计中,以上三部分并不一定独立分开的。由于,PHY 整合了大量模拟硬件,而 MAC 是典型的全数字器件。考虑到芯片面积及模拟 / 数字混合架构的原因,通常,将 MAC 集成进微控制器而将 PHY 留在片外。更灵活、密度更高的芯片技术已经可以实现 MAC 和 PHY 的单芯片整合,可分为下列几种类型:
CPU 集成 MAC 与 PHY,目前来说并不多见:

CPU 集成 MAC,PHY 采用独立芯片,这种在车载以太网上是主流方式,因嵌入式芯片厂商一般都将 MAC 集成在 MCU 内部,而 PHY 芯片则由 OEM 或控制器供应商自己选择:

CPU 不集成 MAC 与 PHY,MAC 与 PHY 采用集成芯片。这种在消费用以太网上比较比较常见,如电脑的网卡有这种方式的。

在以太网连接线束上,车载以太网与消费用以太网也是不同的,首先消费用以太网的标准主要采用 10BASE-2、10/100BASE-TX 和 1000BASE-T,其中 1000BASE-T 是使用 RJ45 接口,需要四对双绞线共 8 根线进行数据传输,而 10/100BASE-TX 则是只使用四对双绞线其中的两对共 4 根线进行数据传输,如下是 100BASE-TX 的示意图(使用了两对双绞线)。在很早之前的 10BASE-2 则是同轴电缆进行数据传输,因此消费类以太网采用线束总结如下:

而车载以太网一般都基本采用带 T1 的标准,如 IEEE 100BASE-T1(以前称为 OABR)、IEEE1000BASE-T1,这些都使用一对双绞线共两根线进行数据传输:

从上面可知,车载以太网主要采用基于一对双绞线进行数据传输的 100BASE-T1 或 1000BASE-T1 标准,而我们电脑则使用 RJ45 接口采用基于 4 对双绞线进行数据传输的 1000BASE-TX 标准,因此当我们用电脑测量控制器以太网时,需要转换器,如下:

车载以太网是一种点对点通讯,当多个节点的车载以太网互联互通需要交换机,交换机作用如下:

车载以太网帧结构:以太网帧的格式如下:

以太帧有多种类型,不同类型的帧具有不同的格式和 MTU 值,但在同种物理媒体上都可同时存在。常见有两种帧格式,第一种是上世纪 80 年代初提出的 DIXv2 格式,即 Ethernet II 帧格式。Ethernet II 后来被 IEEE802 标准接纳,并写进了 IEEE802.3x-1997 的 3.2.6 节。第二种是 1983 年提出的 IEEE802.3 格式。
这两种格式的主要区别在于,Ethernet II 格式中包含一个 Type 字段,表示以太帧处理完成之后将被发送到哪个上层协议进行处理。IEEE802.3 格式中,同样的位置是长度字段。
汽车行业通常使用 Ethernet II 格式,该格式还可包含 VLAN 信息作为扩展,因此,又分基本 MAC 帧(无 VLAN)和标记 MAC 帧(包括 VLAN)两种。

车载以太网帧传输过程:上面我们已经提到,车载以太网是基于 TCP/IP 的网络模型,因此我们先不考虑应用层数据是根据哪种应用层协议组织的,从应用层来的数据,经过传输层会加上 TCP/UDP 报头,再到网络层的 IP 报头,然后到链路层增加 MAC 地址等信息,最后由 PHY 转换成线路上的二进制流实现在发送端和接收端的数据传输。

其中上面传输层的 TCP 协议和网络层的 IP 协议,而应用层协议有不少,车载以太网应用协议主要有 AVB/TSN/DoIP 和 SomeIP。
首先 DoIP 即 Diagnosticsover IP,我们接触最多是 DoCAN(Diagnostics over CAN), 两者之间的协议差异是不大的,差一点主要体现在两方面:
-
取代了 ISO 11898 (CAN) with Ethernet
-
取代了 ISO 15765-2 with TCP/IP

AVB 主要用于流媒体的数据传输,因流媒体数据的传输必须以正确的顺序 (必须按照顺序表示出来),同时以定时的方式 (不能超时),此外 AVB 具有灵活,开发标准,广泛接收,运行在任何以太网 PHY 的优点。
AVB 的范畴仅限于流媒体,而新兴的技术支持 ADAS 和自动驾驶车辆需求远大于流媒体的需求,因此为了适用汽车智能化的发展趋势,有了 TSN。

因此车载以太网在现有的基础上,为符合未来的新的应用场景其实也是不断在演进。同时车载以太网的测试技术也会越来越重要,例如此次的英特佩斯控制系统有限公司所介绍的产品则覆盖了以太网各场景的测试设备支持。
总结
数据量的提升、OTA 更新、HAD 的冗余要求、互联环境下的安全保障,以及跨行业标准协议的需求会推动汽车以太网的快速发展,并使其成为冗余中央数据总线的关键助推因素。以太网解决方案可以实现跨域通信,并通过添加以太网扩展,例如音 - 视频桥接(AVB)和时间敏感网络(TSN)等,来满足实时性要求。
本地互联网络、控制器区域网络等传统网络将继续在车辆上运用,但仅用于封闭式的低级网络,如传感器和执行器等。FlexRay 和 MOST 等技术有可能被汽车以太网及其扩展(如 AVB、TSN 等)取代。「汽车以太网」 在以后将成为整车支柱。