
作者:焉知智车年会

在【首届焉知汽车年会】上,上海戴世智能科技有限公司副总陆海峰以 「P-Box in 2021」 为主题,分享了立足于加速自动驾驶技术的进步,打造零部件 P-Box 的应用实践。
没有高精度地图自动驾驶很痛苦
新冠疫情以后,L2 已成燎原之势,像卡罗拉、飞渡这样的车也有 L2,L3 也成为了一个大趋势。

自动驾驶 1 到 5 级,一度大家对 L3 以上觉得是不切实际的概念。但是到今天行业各个领域的专家都对各类 Pilot 功能充满了憧憬。所谓 「脱手」,不管是在高速上,还是拥堵路况都非常有吸引力。

为什么需要使用 「定位盒子」,不如问为什么需要高精度地图?定位盒子就是为了高精地图服务的支撑组件。就我个人而言,对我来说开车是一件没太大乐趣的体力劳动。特别是有些时候驾驶很痛苦,对路况不熟悉经常开错匝道,如果没有高精度地图,自动驾驶也是很痛苦的。
我体验了不少没有高精度地图的高级辅助驾驶车辆,临了发现这个道不能直走的时候,做了硬性变道,给乘员的感觉很突兀,也丧失了安全感。

所以,「电子地平线」 是现在比较流行的概念,已提了很多年,至少向前 3 公里,向后 1 公里,这是自动驾驶给我们带来的最大的可能性。

三大传感器中目前用于定位的只有一个 —— 摄像头,说的是横向车道保持。而自动驾驶发展非常快,很快要上激光雷达,毫米波点云也会上,到目前为止,像小鹏已经批产的高精度定位是三冗余系统。

GNSS 是卫星系统,INS 是惯性导航系统,CAM 是摄像头。三者在定位方面都各有优缺点,点越大,说明精度越差,达到一定程度就成为了红色,是不可接受(NO GOOD)。

随着时间推移这个点会变大,圈也在变大,INS 密度非常高,刷新率是 GNSS 无法比拟的。其鲁棒性能与摄像头进行一定程度的互补,比如说有些逆光场景,或者是明暗变化场景,这个时候摄像头会有短暂的毫秒级别的失效。
引入 P-Box 电气架构
所以我们说,汽车上的很多零部件不能说谁有多好,都是各有所长,三个臭皮匠顶一个诸葛亮。汽车上基本上是异构冗余,互相弥补共同去实现复杂的功能。
所谓定位盒子是一种组合惯导,现在主机厂喜欢称之为 P-Box。其在自动驾驶电气架构中的位置如图所示。作为负责高精度定位的小 ECU,将定位数据提供给域控中的地图模块,实现与高精度地图的匹配。

那么,HWP 定位需要什么样的精度才够用呢?一个是惯性推算,还有一个是 RTK(实时动态差分)。

首先,假设一辆车在高速公路上行驶,按照国家标准车道宽 3.75 米,我们希望它横向不要偏出车道,大概是 0.87,包括直线和转弯。在这个过程中,绝大部分一般工况下,高精度卫星修正、轮速、摄像头等这些都能正常工作,大家互相校验。

但是在一些特殊工况下,可能 RTK 不能用,有些地方摄像头不能用,这时就体现出 P-Box 的作用了。

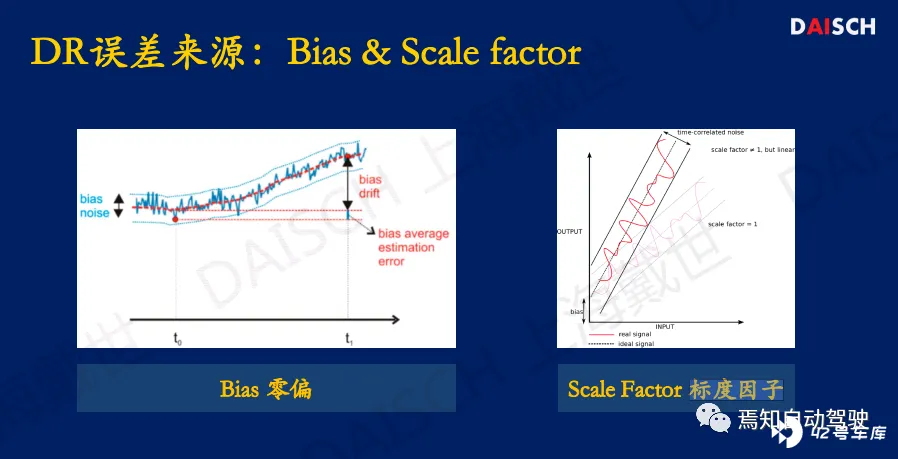
这时把惯性误差进行两个分解,看看为什么它的推算会有误差?主要来源于是传感器非理想性,例如零偏和标度因子。零偏就是明明没有转弯,却显示有多少有一定的角速度。
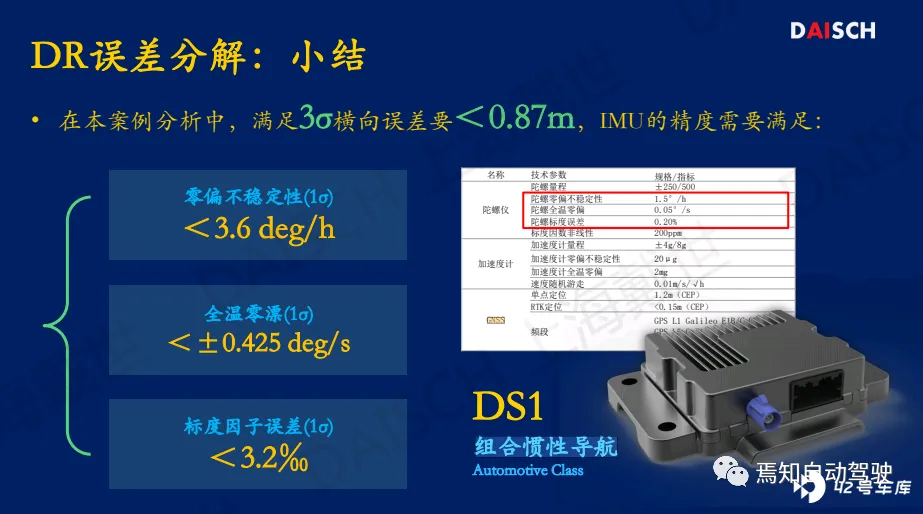
通过简单的分解,比如让误差因子 50% 对 50%,每个贡献不能超出 0.435 米误差,利用一个 3 Sigma 图,比如说 3 Sigma 要达到 99.7%,这时看指标到底能做成什么样子。
后面进行了一系列公式推算,比如做了一个简单的积分公式推导,列了三个不同相关性标度因子误差:千分之三、千分之四、千分之五。
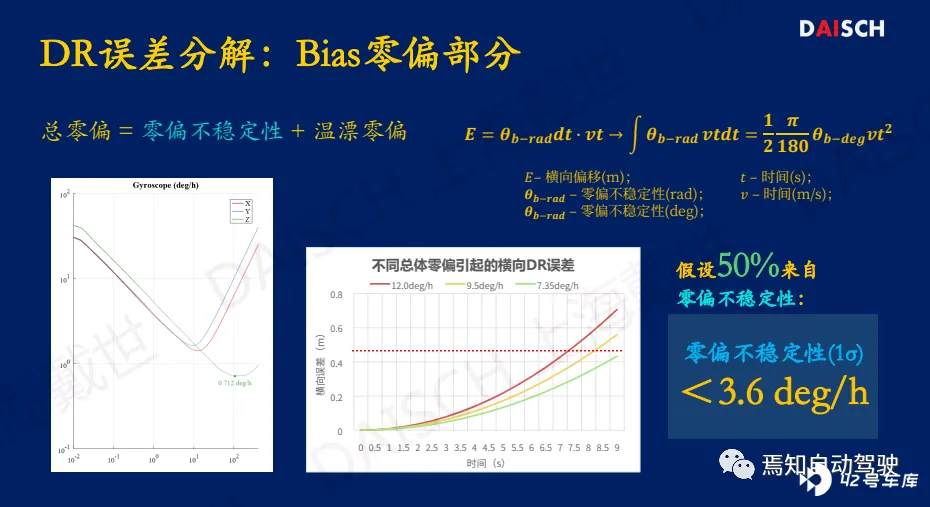
再来看零偏部分,一个是零偏不稳定性 + 温度零偏,温度变化导致零偏的是 MEMS 传感器的特性。进行分解,比如 50% 对 50% 先关注零偏不稳定性,指标都比较低,甚至手册上查不到。过去都>10 度 / 小时,现在性能越来越好,成本也越来越好。按 50% 对 50% 的算法,它的陀螺零偏不能大于 3.6 deg/h。
对于 IMU 的指标是一个无穷尽的追求,但是工程上往往要考虑成本效益。有很多指标通过标定可以达到个 10 倍,甚至 20 倍以上的提升,那我们说这个是有成本效益的工程手段。使用成本先对较低的传感器,通过标定提升性能,温漂零偏、标度因数就是很好的例子。
总之,上述案例分析中,IMU 的精度需要满足 3 Sigma 横向误差小于 0.87 米。上海戴世最新一代针对前装的 P-Box,为主机厂专门提供了一个前装组合惯性导航,可以说 7、8 年发展下来总算有了前装量产零部件。类似指标的产品过去可能都要卖十几万元。在 2022 年很快大家就会在市面上买到装备这类新一代运动与位置传感器的汽车。
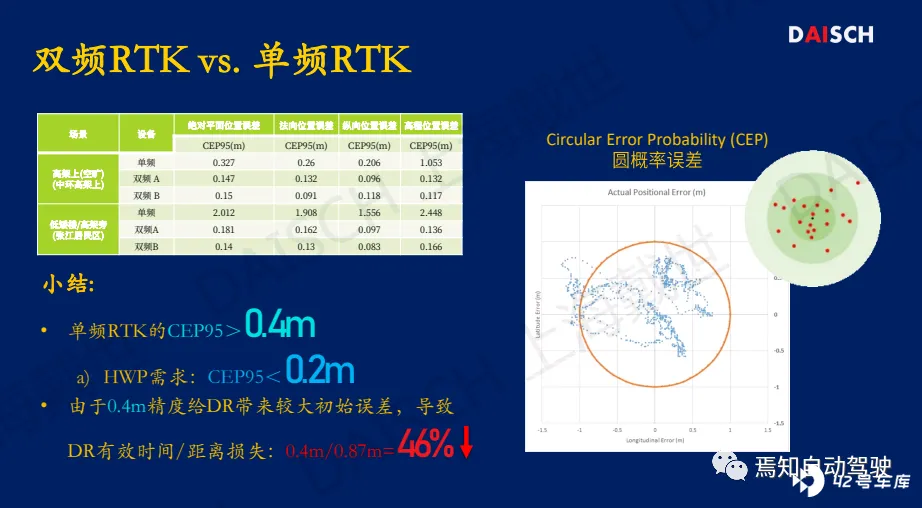
关于双频 RTK 和单频 RTK 经过多年的迭代,目前已经得到了行业的共识成为一个标准配置。类似的高精度定位服务企业国内有千寻等,他们的差分修正数据提供给卫星模组,是一种数据服务,然后由计算单元计算。以在某国内一线城市的高架上的 RTK 定位数据做的分析。可以看到,单频 RTK 在很多区域定位精度都远低于双频 RTK。其实,北斗、GPS、格洛纳斯都是两个频段,一下子就翻上去了,卫星计算也吃算力,所以芯片算力也要跟上。

另一点是,双频互相之间有冗余,性能稳定性好很多。这里的 CEP(圆概率偏差)是军用上的概念,落点落在一个圈里,95% 的概率是多大的圈呢?如果是单屏 RTK,这个圈大于 0.4 米,双频能到 0.2 米。可以看到,单频 RTK 之前也有很多车在用,其实对惯性推算是一个很不好的初始条件,上来就衰减 46% 的性能,虽然已经配了很好的 P-Box、IMU,但是因为单、双频的缘故,单频的初始误差就摆在这,再怎么算,也很容易偏出车道。
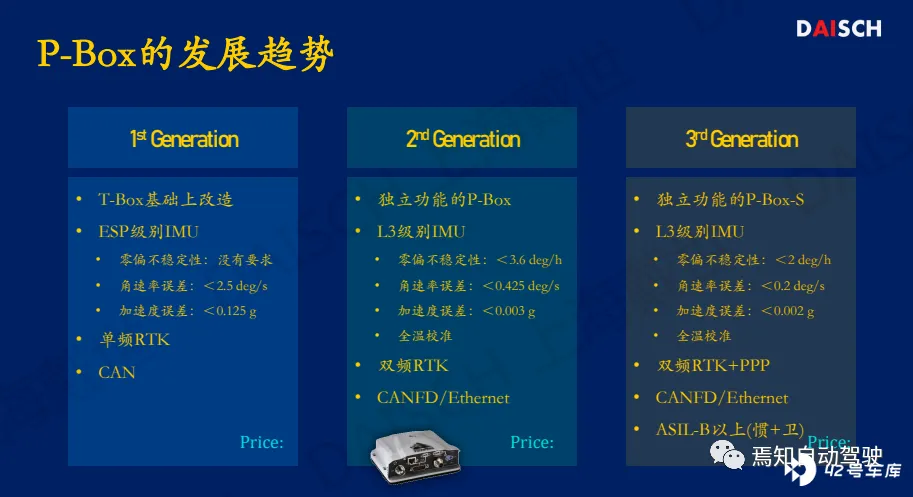
P-Box 的发展趋势
第一代 P-Box 都是 ESP 级别的产品,对陀螺没有要求,单频 RTK 前两年就有公司生产。现在快速普及的是第二代 P-Box,IMU 级别比较高,指标都有,还有全温度量程校准、CANFD、以太网(由于以太网成本高一点,不是所有公司都会用)。第三代考虑的是功能安全,光靠 4G 的网络差分链路解决不了,所以需要上 SSR 一类的星基差分,这是一个成本问题。是不是消费者可以使用,可能要想办法收年费,像特斯拉一样。现在有很多想象空间,以前可能不敢想,以前卖车就是一锤子买卖。以前做军民两用的是 NovAtel 的产品,五位数的价格。现在我们量产的就是三位数的价格,姿态很低,做的足够便宜。如果到第三代,功能安全可能会超过 1000 块钱,但是不会差的太多,也可以在后续服务费上做优化方案。
从军工到民用
戴世智能今年是第七年,从飞行姿态传感器到汽车电子领域,公司大部分工程师都是 「汽车电子」 基因,重视技术、敬重质量与生产能力。2020 年,戴世在上海建了自己的全自动生产工厂,工艺、装备都是自己开发,掌握全部知识产权。

公司致力于研发生产加速自动驾驶技术进步的零部件,三大系列产品包括针对前装的定位 ECU 及 IMU;测绘级别红盒子系列,非常精准,比军工级性价比高很多;对标国外传统测试行业底盘测试、泊车、组网的产品。

到 2025 年,自动驾驶概念产生 100 年,说不定很多中国公司会脱颖而出,因为中国要走内循环,别人不敢上的装备,国内主机厂都敢上,他们不会受固有思维限制。过去任何时候都没有像现这样离自动驾驶这么近。

戴世已经服务了近 100 家公司,未来将凭借卓越的工程能力和技术服务,服务更大范围的智能相关领域。















