

撰文 | 郑文
编辑|周长贤
「你是我的眼,带我领略四季的变换,你是我的眼,带我穿越拥挤的人潮…… 眼前的黑不是黑,你说的白是什么白……」 耳机里,盲人歌手萧煌奇的歌《你是我的眼》,深情,高亢。
电脑屏幕里,播放着一段高阶智能驾驶车辆在闹市区行驶的视频,自主变道、自主超车、红绿灯识别、无保护左转、窄路借车道绕行…… 驾驶风格老练,宛如老司机,但从车外行人的视角看,如果不多加关注,很难意识到这辆车是无人驾驶。
但如果再仔细分辨,这些车的车顶上方,或车头中间、两侧,以及车尾很有可能与传统车型的设计风格迥异,它们装配着一颗颗激光雷达,如同一只只丑萌,却足以让智能车穿透黑暗的 「眼睛」。
高阶自动驾驶行为的完成总共分三步,感知环境、规划路径、控制车辆。这三步中,最主要的难题就是感知。
感知为什么这么难?或许从人类的眼睛里可以探寻到一定的原因。过去,人们似乎只关注大脑是人类最重要的器官,但很少知道,眼球占领着大脑超过 65% 以上的 「内存」,它感知的信息不仅繁多,而且立体动态。而同样的效果,让感知硬件去实现,则很有难度。
当下,实现高阶智能驾驶需要如何去搭配感知硬件的方案还在持续探索优化中。甚至于,激光雷达能走到今天,成为高阶智能驾驶的标配地位都不是一蹴而就的。关于 「自动驾驶是否需要激光雷达」 的探讨,从 2018 年春天延续到 2019 年夏天,再到 2020 年秋天,2021 年冬天。
视觉感知的原理就是标注局部特征,然后在海量数据库进行特征匹配,进而判断出物体的总体属性。这一过程虽然模拟了人脑识别物体的过程,但无法判断距离。为了解决此问题,过去在不借助雷达的前提下,仅靠摄像头主要有以下两种解决方法:
- 单目测距
识别物体大小和周围环境、并进行焦距和比例关系计算。这方案的优势是硬件要求低,寿命长,但是它是识别物体类型,明显劣势是对图像数据库和识别算法要求很高,例如车辆高度数据要做到精确匹配,否则误差可能高达 20%~30%。Mobileye 此类方案的误差在 3%~15%。
- 多目测距
多个摄像头不同角度下的视差进行等比例计算。这个方案不依赖图像数据库,但是要求实时匹配,对算力要求高且硬件成本也高。镜头工艺、安装、行驶震动导致误差普遍达到 5%。误差范围是 10m 量级。
视觉感知在实践过程中产生了不少缺陷:
-
天气环境因素造成的视觉传感器致盲,比如逆光炫目、沙尘暴遮挡等;
-
小目标物体在中低分辨率视觉感知系统中可能会造成目标晚识别,比如减速带、小动物、锥筒等;
-
异形目标由于未经训练可能造成无法匹配,被漏识别,比如道路落石、前车掉落轮胎等;
-
横向测距误差;
-
对假目标物的探测失误,比如将人的投影投射到路上,会引起一部测试用的特斯拉 Model X 做出自动紧急制动,就好像对面真的有人;
-
对假车道线的探测失误,如果投射更明亮的分道线图像,则试验车辆会沿着假的车道线行驶。
除了摄像头,有些视觉感知方案中会融合或预埋毫米波雷达和超声波雷达进行相互配合补盲,但是在高阶智能驾驶中无穷无尽的 Corner Case 中,摄像头和毫米波雷达可能双失效。
比如在近距离目标识别中,摄像头只能识别车辆部分信息,而毫米波雷达对近距离目标识别容易导致回波干扰,而无法对近距离切入目标进行有效识别;夜间大量车流中,毫米波雷达容易产生多径反射干扰,摄像头也可能无法准确识别物体。
以上场景产生的问题,汽车行业最新的普遍答案是激光雷达与摄像头 + 毫米波雷达的近场感知互为冗余。传感器之间有很强的互补性,激光雷达有高精度的感知,视觉有丰富的语义信息,毫米波雷达有很好的穿透性,在恶劣天气环境中依然可以有稳定的感知输出。
如今,基本共识是,在 L3 以上的自动驾驶感知系统上,激光雷达是必不可少的组件,它的目标探测能力非常显著。
眼下,激光雷达的分类也非常多,按照测距原理来划分,激光雷达可以分为机械式、混合固态和固态,具体又可再细分。
虽然在总体思维中,固态激光雷达是未来,混合固态技术路线是当下,宣布量产上车的也基本都是混合固态,但是更准确的技术路线优势就很难分辨了。由于实际应用场景不同,这些激光雷达间也并非纯粹的竞争关系。
此前《出行百人会 / AutocarMax》在与亮道智能创始人剧学铭的一次沟通中,他也明确指出目前激光雷达市场在技术路径的选择上,处于百花齐放的阶段,不存在哪个技术路线一定要把其他的都干掉的问题,也就是说,不同的技术路线会共存。

不同技术路线的激光雷达有各自的优缺点,需要综合配比,有些技术路线适合做中长距甚至超长距,有的技术路线就偏向于做中短距、甚至短距,未来从自动驾驶不同的功能需求角度来讲,都有应用空间。
「从我们的理解上,Flash 可能在目前的状态做一些中距、近距的应用会有比较好的落地空间,但是前向的像 MEMS 为基础的高分辨率、性价比的产品,目前比较适合用在前向上,这是一个组合关系。」 在剧学铭看来,场景覆盖很重要。
就在这话说完的一个多月之后,5 月 13 日,亮道智能发布了国内首款纯固态 Flash 侧向激光雷达 LDSense Satellite。产品将会在 2023 年下半年 SOP。

正如剧学铭强调的那样,这款侧向补盲产品是基于当下非常明显的场景痛点而诞生的。1、尽早识别紧急 Cut-in(加塞场景),有效减少碰撞发生;2、加大垂直视场角,增加对低矮物的探测感知;3、增加道路周边静态物识别,实现车辆更精准的车道级定位。
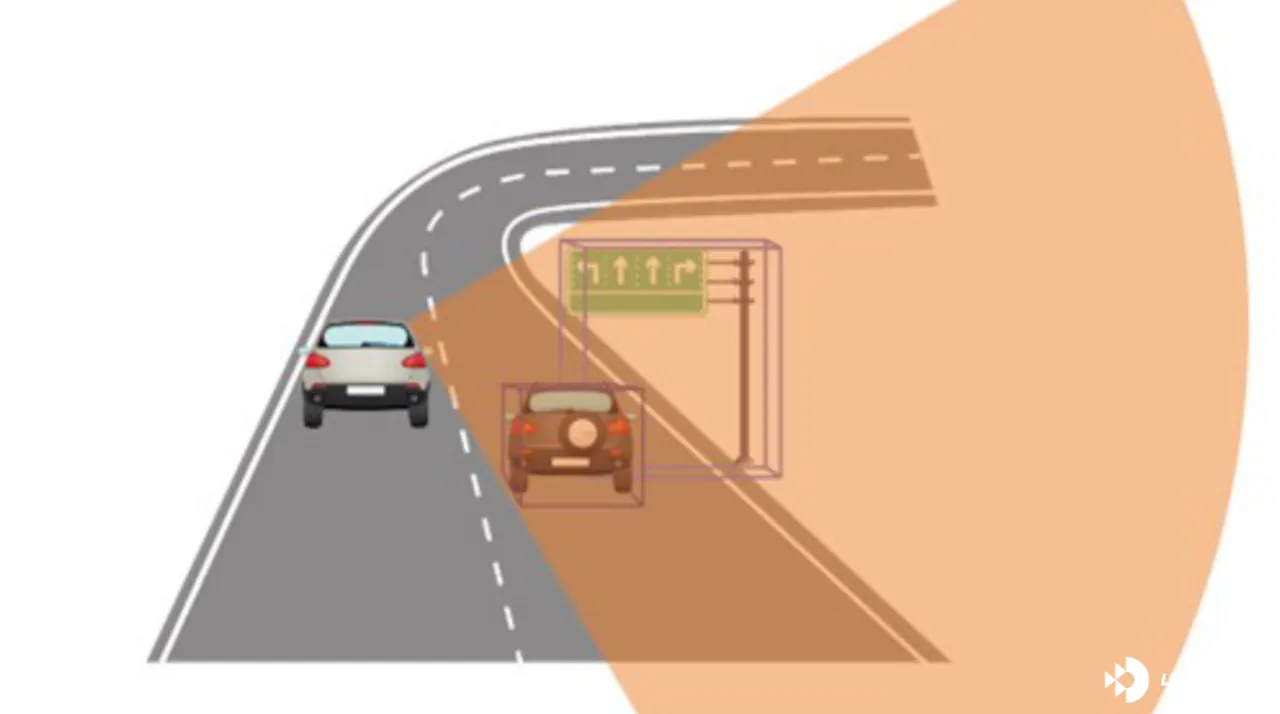
场景一:尽早识别紧急 Cut-in(加塞场景),有效减少碰撞发生。
目前主流的前向激光雷达安装在车头正前方的位置,水平视场角(H-FOV)在 90°~120°。按照 H-FOV 为 120° 来计算,急加塞大约在车头超过本车 3.6m 的时候才能探测到,极可能会发生碰撞。

通过安装侧向补盲激光雷达,可以实现车头 180° 的感知范围,在对方车辆试图跨越本车的时刻即可探测到。

而当采用 1 个前向加 2 个侧向激光雷达方案时,可以进一步扩大感知范围,实现超过 270° 的感知覆盖,获得更加舒适的自动驾驶路径规划方案。

场景二:加大垂直视场角,增加对低矮物的探测感知。
车道前方的临时掉落物,突然冲出来的小猫小狗,受制于摄像头环境冗余度不够,以及算法训练的极限工况数据有限,容易被摄像头感知剔除。马路边沿与车道线,摄像头无法达到精确定位,前向主激光雷达垂直视场角(V-FOV)有限,根据安装位置高低的不同,存在 3m~7m 以上的视觉盲区。
而侧向补盲激光雷达 LDSense Satellite 的最大特点就是超大垂直视场角 > 75°。不低于 75° 的侧向激光雷达可以与前向激光雷达的近场盲区进行点云互补,能够实现低矮物体比如马路边沿、减速带、小猫小狗等目标物,以及相邻车道线的探测。
盲区的大小由几个因素构成:垂直视场角、激光雷达的安装高度(Height1)、前引擎盖的高度(Height2)、激光雷达所能调整的向下倾斜俯仰角。

目前市场上的 1+2 方案,安装在两侧的激光雷达也不是为补盲场景专门开发的,所有垂直 FOV 一般是 25°,无法达到补盲要求。
从下图例子看,当安装在车顶位置的垂直 FOV 25° 的长距激光雷达,有很大一片低矮处盲区,将这种激光雷达装在前大灯位置,盲区尽管会减小,还是有不小的一片。如果在前大灯或侧翼子板位置安装垂直 FOV 90° 的侧向激光雷达,低矮盲区几乎消失。

即便是以高度 10cm 的马路边沿为例,侧向补盲激光雷达不仅可以实现 0.35m~15m 的近场探测,还能够在 0.35m 处达到 30 行点云的超高分辨率的探测效果。
场景三:增加道路周边静态物识别,实现车辆更精准的车道级定位。
在无明显车道线或车道线模糊的路段或者路口,摄像头容易规划出波动较大的轨迹线,影响通行体验。而当侧向激光雷达安装于顶部位置,在现实相邻车道目标物的感知功能外,还可以通过感知道路周边静态标识物,获得准确的相对位置信息,与高精地图结合,实现车道级精准定位。
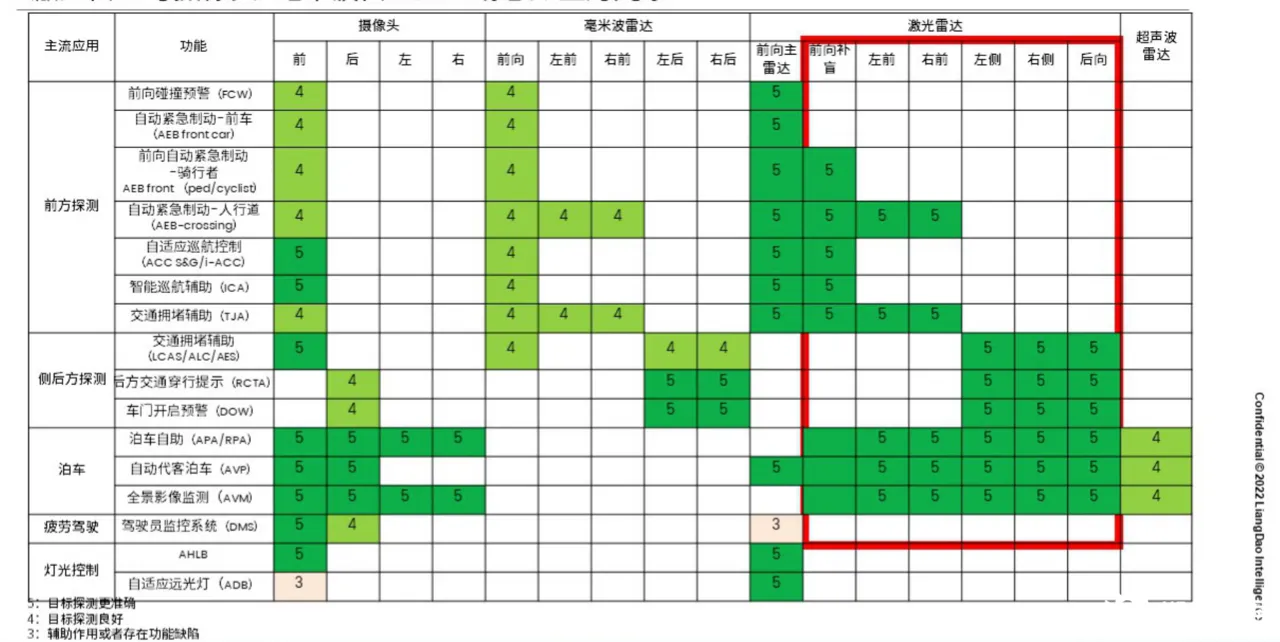
另外,在很多场景中,侧向补盲激光雷达也能起到功能的性能提升作用。前方探测中的 AEB front(ped/cyclist),AEB-crossing,ACC S&G/i-ACC 自适应巡航系统,ICA 智能巡航辅助,TJA 交通拥堵辅助驾驶;侧后方探测中的 LCAS/ALC/AES 交通拥堵辅助,RCTA 后方交通穿行提示,DOW 车门开启预警;泊车时的 APA/RPA,AVP,AVM;除此之外,加上激光雷达作为 5V5R 的辅助驾驶传感器的补充可提升感知的性能及可靠性,进而来提升系统的安全性。
而在路径的选择上,选择 Flash 是综合考量。它是纯固态的技术方案,通过芯片化的发射与接收器件,无任何运动部件。可靠性高,寿命长,易于生产,更容易实现全自动化生产,产品一致性高。
虽然,Flash 激光雷达受限于其 VCSEL 激光器的激光密度,功率密度低,探测距离较短,但是,Flash 技术用来做补盲(覆盖范围在 30m~50m),其感知覆盖范围足够支持需求,和前向主雷达实现感知互补。
伴随着切实的痛点与需求,一颗侧向补盲雷达就此诞生,自动驾驶的感知方案在激光雷达的推动下变得越来越精准。
自动驾驶的黎明尚未到来,关于激光雷达的故事远远不会结束。


















