

作者: 我叫斯蒂芬
今年 Tesla FSD 部分,感知网络从去年的 Bev 感知 (Hydranet) 的基础上,更近一步,提出了 occupancy network,那么咱们一起来看个究竟。
为什么是 occupancy network?
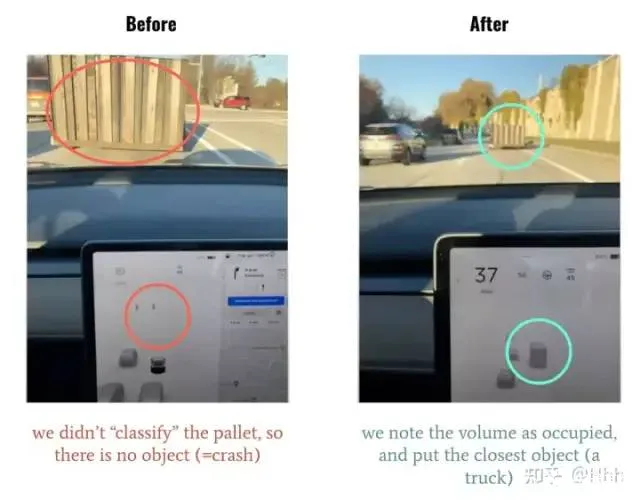
在基于 LiDAR 的系统中,可以根据检测到的反射强度来确定对象的存在,但在相机系统中,必须首先使用神经网络检测对象。如果看到不属于数据集的对象怎么办?比如侧翻的大卡车。仅此一项,就引发了很多事故。

可行驶区域的一些问题
rv、bev 空间下可行驶区域会有一定问题:
-
地平线的深度不一致,只有 2 个左右的像素决定了一个大区域的深度。
-
无法看穿遮挡物,也无法行驶。
-
提供的结构是 2D 的,但世界是 3D 的。
-
高度方向可能只有一个障碍物(悬垂的检测不到),目前是每类对象设置固定的矩形。
-
存在未知物体,例如,如果看到不属于数据集的对象。
所以希望有种通用的方式来解决该问题,首先能想到的是 bev 下的可行驶区域,但相对来说在高度维会比较受限,索性一步到位变成 3d 空间预测、重建。
Occupancy Network
2022 CVPR 中,tesla FSD 新负责人 Ashok Elluswamy 推出了 Occupancy Network。借鉴了机器人领域常用的思想,基于 occupancy grid mapping,是一种简单形式的在线 3d 重建。将世界划分为一系列网格单元,然后定义哪个单元被占用,哪个单元是空闲的。通过预测 3d 空间中的占据概率来获得一种简单的 3 维空间表示。关键词是 3D、使用占据概率而非检测、多视角。
Occupancy Network
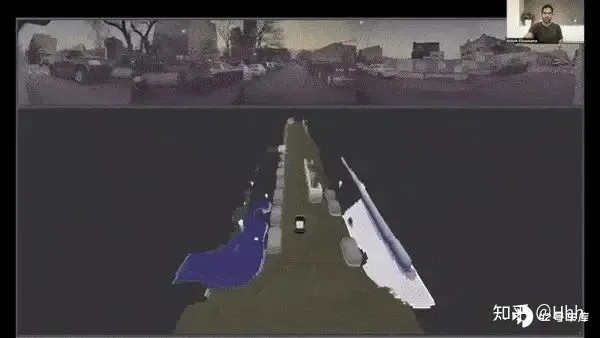
这里输出的并非是对象的确切形状,而是一个近似值,可以理解为因为算力和内存有限,导致轮廓不够 sharp,但也够用。另外还可以在静态和动态对象之间进行预测,以超过 100 FPS 的速度运行(或者是相机可以产生的 3 倍以上)。
2020 AI day 中的 Hydranet 算法中有三个核心词汇:鸟瞰图 (BEV) 空间、固定矩形、物体检测。而 occupancy network 针对这三点有哪些优化,可以看:
第一是鸟瞰图。在 2020 年特斯拉 AI 日上,Andrej Karpathy 介绍了特斯拉的鸟瞰网络。该网络展示了如何将检测到的物体、可驾驶空间和其他物体放入 2D 鸟瞰视图中。occupancy network 则是计算占据空间的概率。

BEV vs Volume Occupancy
最主要的区别就是,前者是 2D 表示,而后者是 3D 表示。
第二是固定矩形,在设计感知系统时,经常会将检测与固定输出尺寸联系起来,矩形无法表示一些异形的车辆或者障碍物。如果您看到一辆卡车,将在 featuremap 上放置一个 7x3 的矩形,如果看到一个行人,则使用一个 1x1 的矩形。问题是,这样无法预测悬垂的障碍物。如果汽车顶部有梯子,卡车有侧拖车或手臂;那么这种固定的矩形可能无法检测到目标。而使用 Occupancy Network 的话,看到下图中,是可以精细的预测到这些情况的。

固定矩形 vs Volume Occupancy
后者的工作方式如下:
-
将世界划分为微小(或超微小)的立方体或体素
-
预测每个体素是空闲还是被占用

体素空间中的被占用体素
这里意味着两种方法的思维方式完全不一样,前者是为一个对象分配一个固定大小的矩形,而后者是简单地说 「这个小立方体中有一个对象吗? 」。
第三点,物体检测。
目前有很多新提出来的物体检测算法,但大多面向的是固定的数据集,只检测属于数据集的部分或全部对象,一旦有没有标注的物体出现,比如侧翻的白色大卡车,垃圾桶出现的路中,这是没法检测到的。而当思考和训练一个模型来预测 「这个空间是空闲的还是被占用的,不管对象的类别是什么?」,正可以避免这种问题。
对象检测 vs Occupancy Network
基于视觉的系统有 5 个主要缺陷:地平线深度不一致、物体形状固定、静态和移动物体、遮挡和本体裂缝。特斯拉旨在创建一种算法来解决这些问题。
新的占用网络通过实施 3 个核心思想解决了这些问题:体积鸟瞰图、占用检测和体素分类。这些网络可以以超过 100 FPS 的速度运行,可以理解移动对象和静态对象,并且具有超强的内存效率。
模型结构:

cvpr 时的网络结构
-
输入为不同视角的图像(总共 8 个:正面、侧面、背面等......)。
-
图像由 Regnet 和 BiFPN 等网络提取特征
-
接着 transformer 模块,使用注意力模块,采用位置图像编码加上 QKV 获得特征,以此来产生占用 Occupancy。
-
这会产生一个 Occupancy feature,然后将其与之前的体积(t-1、t-2 等)融合,以获得 4D Occupancy feature。
-
最后,我们使用反卷积来检索原始大小并获得两个输出:Occupancy volume 和 Occupancy flow。

AI day 时的网络结构
相比 cvpr 时,AI day 上的分享更加详细,主要有三点更新:
最左侧是基于 photon count 的传感器图像作为模型输入(虽然鼓吹的很高大上,其实就是 ISP 处理前的 raw 数据),这里的好处是可以在低光照、可见度低等情况下,感知的动态范围更好。
temporal alignment 利用里程计信息,对前面时刻的 occupancy features 进行时序上的加权融合,不同的时间的特征有着不同的权重,然后时序信息似乎实在 Channel 维度进行拼接的?组合后的特征进入 deconv 模块提高分辨率。这样看来时序融合上,更倾向于使用类似 transformer 或者时间维度作为一个 channel 的时序 cnn 进行并行的处理,而非 spatial RNN 方案。
相比 CVPR 的方案,除了输出 3D occupancy 特征和 occupancy flow(速度,加速度)以外,还增加了基于 x,y,z 坐标的 query 思路(借鉴了 Nerf),可以给 occupancy network 提供基于 query 的亚像素、变分辨率的几何和语义输出。
因为 nerf 只能离线重建,输出的 occupancy 猜想可以通过提前训好的的 nerf 生成 GT 来监督?
光流估计和 Occupancy flow
特斯拉在这里实际上做的是预测光流。在计算机视觉中,光流是像素从一帧到另一帧的移动量。输出通常是 flow map 。
在这种情况下,可以有每一个体素的流动,因此每辆车的运动都可以知道;这对于遮挡非常有帮助,但对于预测、规划等其他问题也很有帮助

Occupancy Flow
Occupancy flow 实际上显示了每个对象的方向:红色:向前 — 蓝色:向后 — 灰色:静止等……(实际上有一个色轮代表每个可能的方向)
Nerf

特斯拉的 NeRF
神经辐射场,或 Nerf,最近席卷了 3D 重建;特斯拉也是其忠实粉丝。它最初的想法是从多视图图像中重建场景(详见 3D 重建课程)。
这与 occupancy network 非常相似,但这里的不同之处在于也是从多个位置执行此操作的。在建筑物周围行驶,并重建建筑物。这可以使用一辆汽车或特斯拉车队在城镇周围行驶来完成。
这些 NeRF 是如何使用的?
由于 Occupancy network 产生 3D volume,可以将这些 3D volume 与 3D-reconstruction volume(Nerf 离线训练得到)进行比较,从而比较预测的 3D 场景是否与 「地图」 匹配(NeRF 产生 3D 重建)。
在这些重建过程中也可能出现问题是图像模糊、雨、雾等...... 为了解决这个问题,他们使用车队平均(每次车辆看到场景,它都会更新全局 3D 重建场景)和描述符而不是纯像素。

使用 Nerf 的 descriptor
这就是获得最终输出的方式!特斯拉还宣布了一种名为隐式网络的新型网络,其主要思想是相似的:通过判断视图是否被占用来避免冲突
总结来说:
-
当前仅基于视觉的系统的算法存在问题:它们不连续,在遮挡方面做得不好,无法判断物体是移动还是静止,并且它们依赖于物体检测。因此,特斯拉决定发明 「Occupancy network」,它可以判断 3D 空间中的一个单元格是否被占用。
-
这些网络改进了 3 个主要方面:鸟瞰图、物体类别和固定大小的矩形。
-
occupancy network 分 4 个步骤工作:特征提取、注意和 occupancy 检测、多帧对齐和反卷积,从而预测光流估计和占用估计。
-
生成 3D 体积后,使用 NeRF(神经辐射场)将输出与经过训练的 3D 重建场景进行比较。
-
车队平均采集数据用于解决遮挡、模糊、天气等场景



















