
不是郑小康
关注
环形隧道
毫末智行
2022-09-13

毫末的分享,可能有人看不懂,可以试着读一读,其实没那么难理解:
如何使用重感知技术解决空间理解问题?
在地图使用的问题上,我们选择的是重感知轻地图的路线,在城市实现导航自动驾驶只用和人类驾驶员一样的普通导航地图而不依赖业界常用的高精地图。
选择这条路线的一个主要技术原因就是城市场景里的道路环境发生变化的频率远远高于高速场景,如果把地图看作一个传感器的话,那么这个传感器的置信度是有些问题的,不知道什么时候什么地方它就会失效。
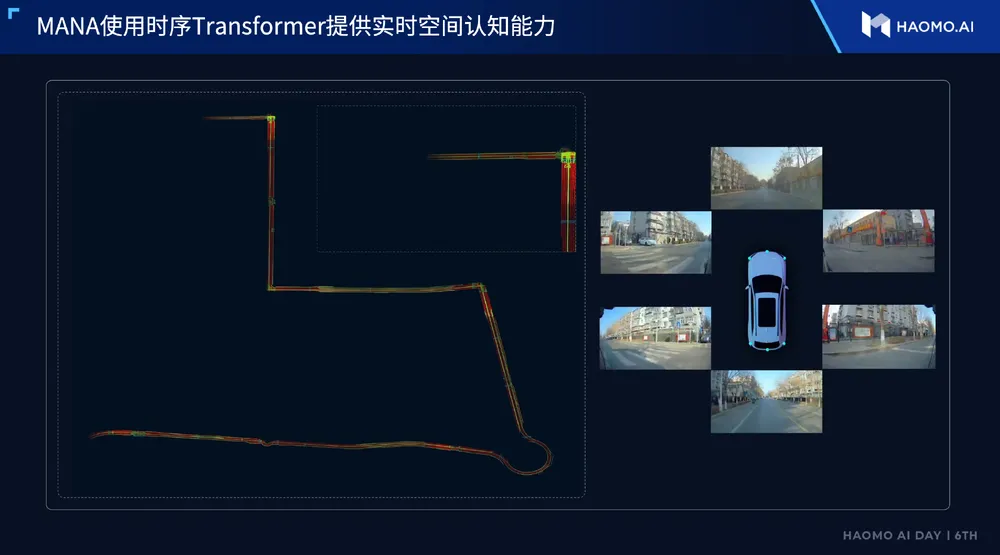
我们的解决方案就是使用 Transformer 建立强感知的时空理解能力。实时建图技术中常用的综合长时间多帧信息来消除抖动,稳定递推的思路还是非常有用的。
所以我们用时序的 Transformer 模型在 BEV 空间上做了虚拟实时建图,通过这种方式让感知车道线的输出更加准确和稳定,在这个时空下对障碍物的判断也更准确了些。
环形隧道
毫末智行
2022-09-13
评论 · 0
0/3
大胆发表你的想法~
相关推荐

Skr💸.
5
1
不是郑小康
1
评论

Blood旌旗
1
评论
Blood旌旗
1
评论

德卤爱开车
1
评论
不是郑小康
赞
评论
不是郑小康
赞
评论
不是郑小康
赞
评论
不是郑小康
赞
评论
不是郑小康
赞
评论
更多



