
刘光腚🍉
关注
环形隧道
辅助驾驶
2022-02-28
大家都说双目前置摄像头,在测距上的精度更高,今天我得展开讲讲了。
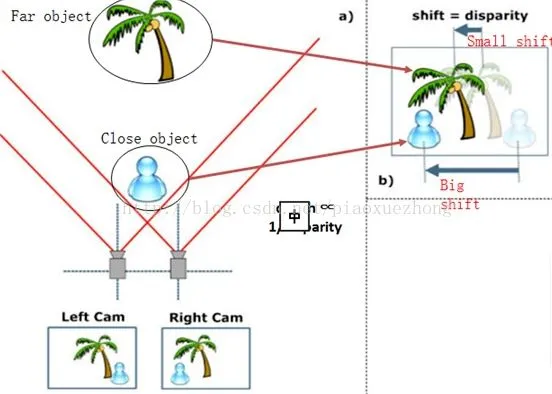
(参见第一张图)
其实双目摄像头测距的原理,就跟我们的眼睛类似。这个图做的非常好,一个人站在椰子树前面,两个相机的独自成像,都显示了不同的位置:左摄像头看到的是人在树的右侧,右边摄像头看到的是人在树的左侧。
而远处的树木,对于摄像头来说,视差是小的;而近处的人,由于视差过大,所以呈现了迥然不同的位置关系。
(参见第二张图)
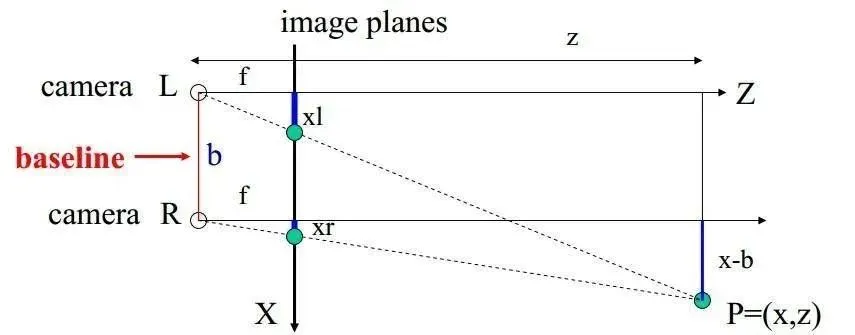
原理大家理解,但「测量绝对距离」,还需要经过一个三角形相似定律:
如图所示,P 是待测点,camera R 和camera L 代表了双目相机的光心位置,而两绿点为点 xl 和 xr 是 P 点在两个相机感光器上的成像点(已知),f 为相机焦距(已知),b 为两相机中心距(已知),z 为所求深度信息。
我们其实需要知道 xl 和 xr 两绿点间距为 d。
第一步:d=b-xl+xf(这个比较的简单不解释了啊)
第二步:d/b=(z-f)/z(相似三角形原理)
最后:z=fb/(xl-xf)
铛铛铛,看到这里,我们就知道双目摄像头测距的原理了。
环形隧道
辅助驾驶
2022-02-28
评论 · 0
0/3
大胆发表你的想法~
相关推荐

Blood旌旗
53
1

星车评
11
1

63
10
1
Blood旌旗
7
2

社区大喵
7
评论
63
5
5
63
4
1
Blood旌旗
3
评论
Blood旌旗
3
评论

车库-小叮当
2
3
更多



