
不是郑小康
关注
理想 L9
理想官宣新车定名 L9
2022-03-16


好了,简单聊聊理想 L9 的 AD 架构设计。4 层覆盖,视觉、雷达、LIDAR、HD Map ?
首先是 360 度的视觉覆盖,L9 前置是双目,而不是特斯拉或蔚来 NIO Pilot 的三目,原因无他,两颗 800 万像素 > 三颗 120 万像素。双目已经可以解决问题,包括特斯拉下一代 HW 4.0 500 万像素,前置也会变更为双目。
左右侧后没什么可说的,理想 L9 在翼子板的位置,和特斯拉,包括小鹏蔚来的布局位置基本一致,不说了。
左右侧前,这个大家的思路是广泛不同的。理想 L9 在左右后视镜的位置,也就是 A 柱下方,和小鹏一样,蔚来在 A 柱的上方,特斯拉在 B 柱内。
蔚来的方案设计上牺牲最多,但视野上最佳,其实视觉老大哥 Mobileye 的纯视觉 Robotaxi,和蔚来 NAD 是一样的位置,可以搜一下。
特斯拉的方案设计上牺牲最少,完美融入车身,但视野上限制比较多,可以看 FSD Beta 在多车道的无保护左转,进展一直不太乐观,绿神最近说特斯拉 HW 4.0 有非常大的概率会更改摄像头布局,我觉得侧前应该会改。
理想 L9 这个位置是相对最优解,满足 360 度视觉覆盖,同时设计上没有过多牺牲。
然后是雷达,这个不展开了,今天的消息,特斯拉在欧洲的车型也移除雷达了。如果你有足够的算力,能通过时间和空间 RNN 让算法获得探测速度、距离的能力,雷达确实没有太大价值。
也就是说,信息密度比较低、360 度的雷达覆盖在今天是越来越缺乏说服力的,但 L9 还是有一个高性能前置雷达作为保底的。
再然后是激光雷达。有博主说 L9 搭载了 3 颗 LIDAR,这应该是个 A/B 定点闹出来的误会。L9 只有 1 颗前置 128 线的半固体 LIDAR,禾赛 AT 128,性能没问题。
至于位置,这个位置看上去确实很突兀,但对 AD 来说视野绝佳,可以感知,也可以通过 LIDAR 定位。
许多 LIDAR 设计更优雅的方案,例如小鹏、集度、FF 等,在车头左右两侧或者是从前舱盖下方升起来,其实就只能感知,没法定位了,另外对结构设计的考验也提高了很多,确实是一个综合平衡的工程问题。
好消息是,LIDAR 也在越来越小,未来的 LIDAR 是可以像摄像头一样,做到前挡风玻璃下方的。
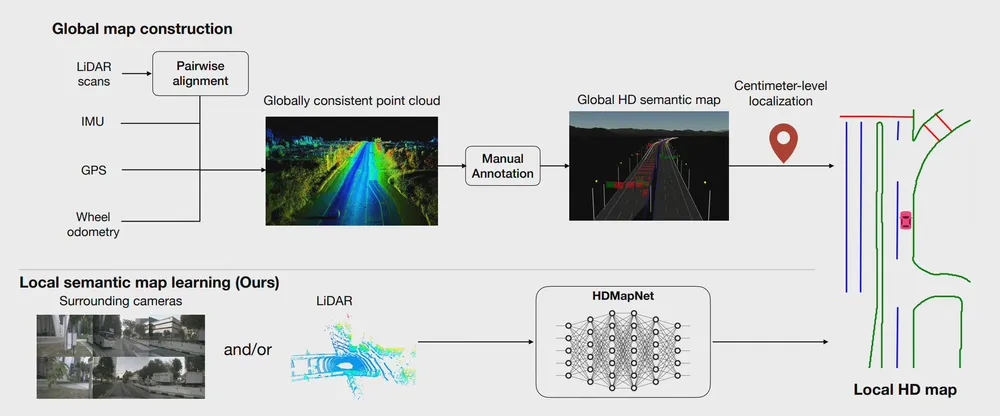
最后是 HD Map,这块理想在持续研究。之前我写过一条微博,理想汽车首席 AI 科学家王轶伦牵头,和清华大学、MIT 联合做的研究。利用数据驱动的思想解决 HD Map 的更新、维护问题,对 360 度的视觉和 LIDAR 点云信息重新编码,预测鸟瞰图中的矢量化地图元素。综合性能表现非常好,也更友好迭代。
最后我想说最感兴趣的是 L9 这个辅助驾驶状态灯,其实无论 ONE 还是 L9,李想是极其厌恶做刷存在感的产品设计的。我非常好奇这个辅助驾驶状态灯内部的推进过程,不知会不会成为自动驾驶时代新的设计语言之一。
最后总结:综合来看第一梯队。
理想 L9
理想官宣新车定名 L9
2022-03-16
评论 · 0
0/3
大胆发表你的想法~
相关推荐

Jamie
杭州理想车友会会长

9
6

友哥的理想
6
1

德卤爱开车
6
1

悦
4
3

加命
车库视频主持人

4
2

Andy
4
1

zsongbo
4
1

杰克
4
1

Maverick.Z
4
2

朱尔蒂尼
3
2
更多



